



- 0基础学电工 第3天 入行必学的电气元件(1)
- 一支电自己就能搞定各种家庭电路,备一直电笔可以节省几百的维修费
- 0基础电工必看,6款免费好用的仿真软件,让你快速上手,底部有下载链接和教程
- 0基础机器人 ABB机器人之 MoveJ MoveC MoveAbsJ运动指令 最详细教程
- 手把手 ABB机器人关节入门操作,3分钟学会如何操作机器人
- 0基础PLC 威纶通宏指令密码设定(设备分期付款功能)完整版 底部HMI源程序,不懂就直接用
- 0基础PLC 三菱FX3U 3轴机械手码垛案例实战编程-第二课(触摸屏编写和定位参数设置)
- 0基础 PLC FX3U系列模拟量输入和输出标准化程序案例,项目直接套用
- 0基础PLC 三菱FX3U 3轴机械手码垛案例实战编程-第五课(自动运行程序编写-2)
- 0基础PLC FX5U内置模拟量与三菱变频器485通讯程序实战案例 完整版 底部有完整PLC程序和参数设置

 下一主题
下一主题热点推荐 更多
-
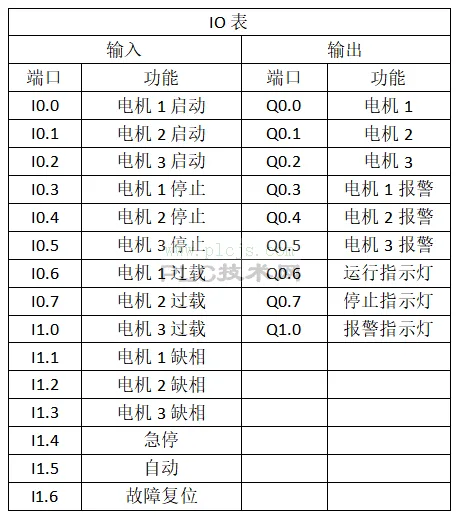
直接上案例!如何编写3台电机轮换的PLC程序?
2026-06-12
-

S7-1200/1500 PLC如何控制SINAMICS V90实现速度控制?(文末赠纸质书籍)
2026-06-12
-
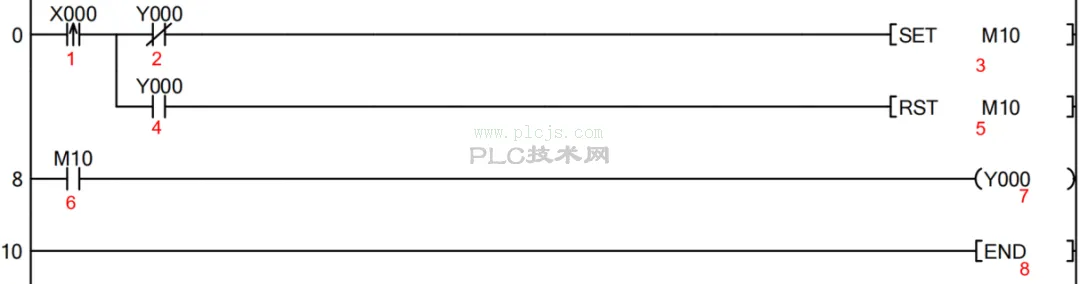
PLC扫描周期与单按钮启停案例分析
2026-06-12
-

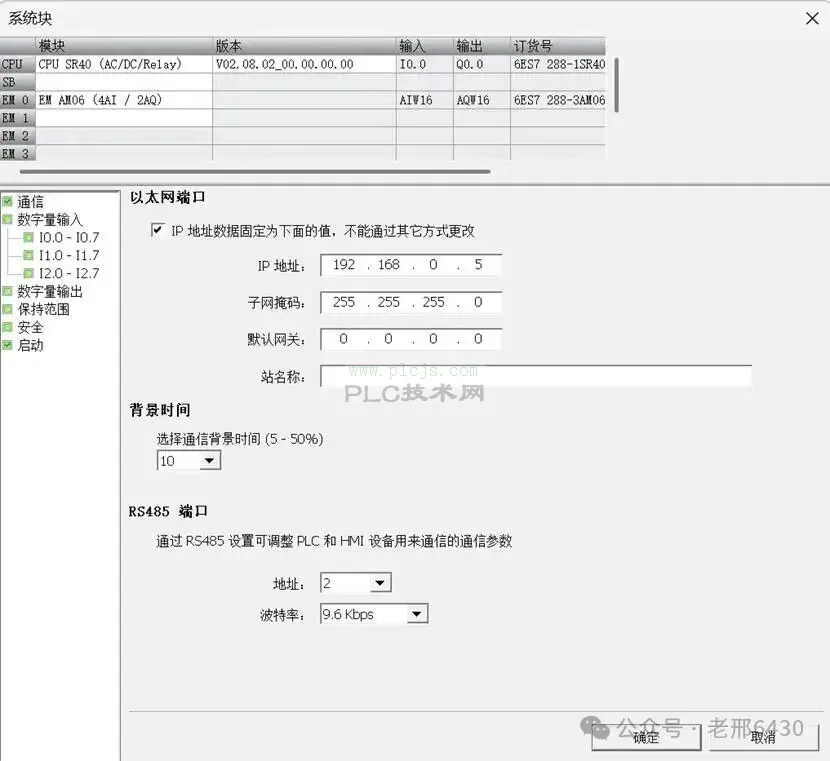
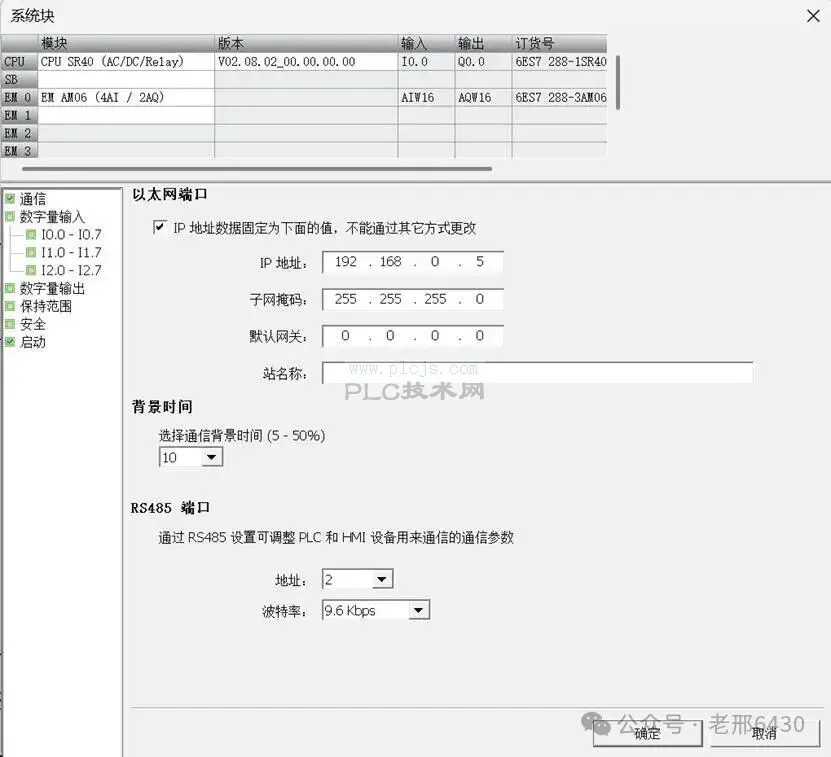
西门子S7-200 SMART全型号详解:SR/ST/CR核心差异是什么?
2026-06-12
-
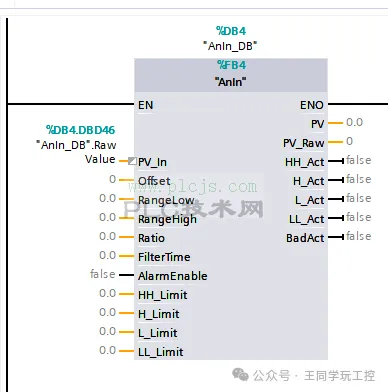
基于PCS7风格的模拟量输入处理FB块设计与应用
2026-06-12
-
27.西门子S7-200 SMART和S7-200 SMART的开放式用户UDP通信
2026-06-12
-
26.西门子S7-200 SMART和S7-200 SMART的开放式用户TCP通信
2026-06-12
-

西门子S7-200 SMART 型号手册
2026-06-12
-

800+自动化专业英语词汇,我帮你全整理好了(建议收藏)
2026-06-12
-

工业自控系统模拟量信号调试教程: 巧用信号发生器,搞定现场85%校验工作
2026-06-12
