



- 《一个电气工程师的SCL牛马日常》
- 西门子SCL综合实例项目功能块1:FB_输送带控制 - 物料输送系统控制模块
- 西门子SCL综合实例项目功能块8:FB_前馈补偿 - 扰动补偿控制模块
- 西门子SCL综合实例项目功能块7:FB_串级PID控制 - 复杂过程控制模块
- 西门子SCL综合实例项目功能块6:FB_PID自整定 - 自动参数整定模块
- 西门子SCL综合实例项目功能块4:FB_气缸控制 - 气动执行机构控制模块
- 西门子SCL综合实例项目功能块3:FB_视觉系统 - 机器视觉检测控制模块
- 【下集】西门子SCL实战:产能统计与班次管理系统深度解析
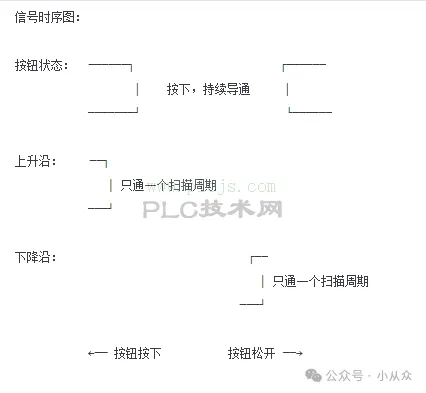
- 【第9集】:定时计数篇|50个SCL编程经典程序-程序12:延时停止控制程序
- 【第10集】:定时计数篇|50个SCL编程经典程序-程序13:闪烁信号发生器

 下一主题
下一主题热点推荐 更多
-
0基础学习PLC,西门子1200 气缸控制机械手抓料放料编程,第10天就交出首份作业,独立
2026-05-01
-
原子笔记:WSL2 核心概念
2026-07-21
-
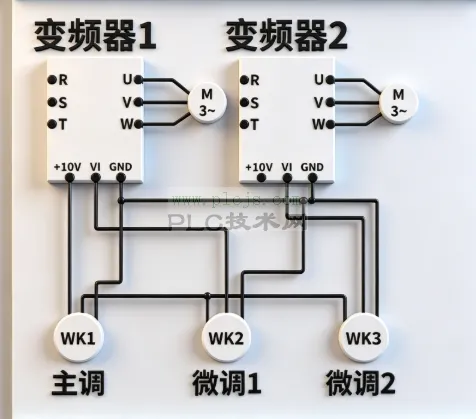
两台变频器同步调速,为什么要用3个电位器?
2026-07-21
-
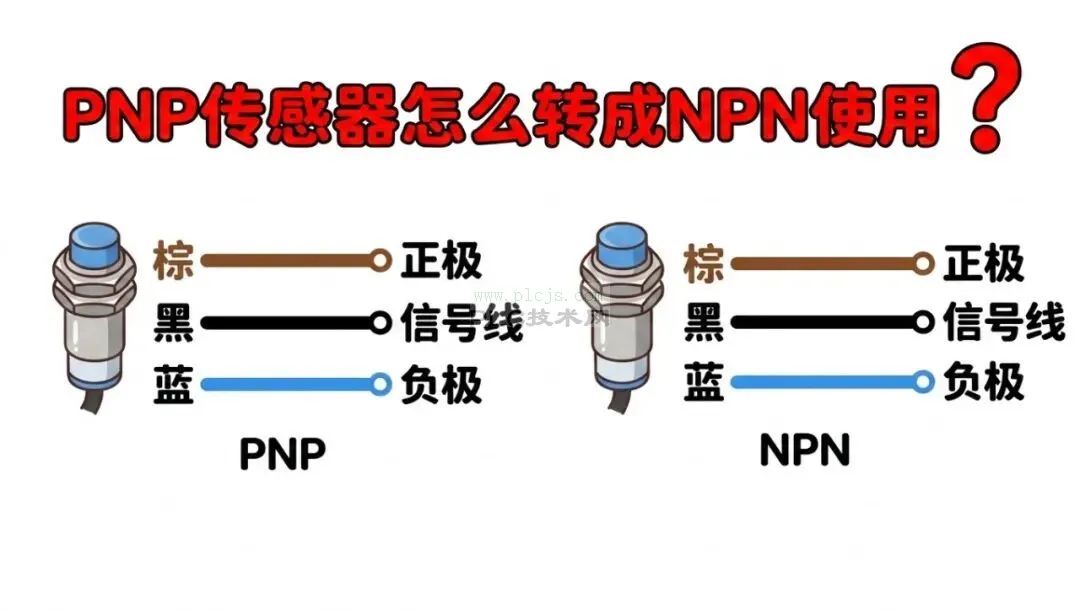
手头只有PNP传感器,不改PLC程序,怎么把它转化成NPN使用?
2026-07-21
-
PLC的输出点坏了,千万不要删除原来的点,直接把新点并联在原来点上就可以了
2026-07-21
-
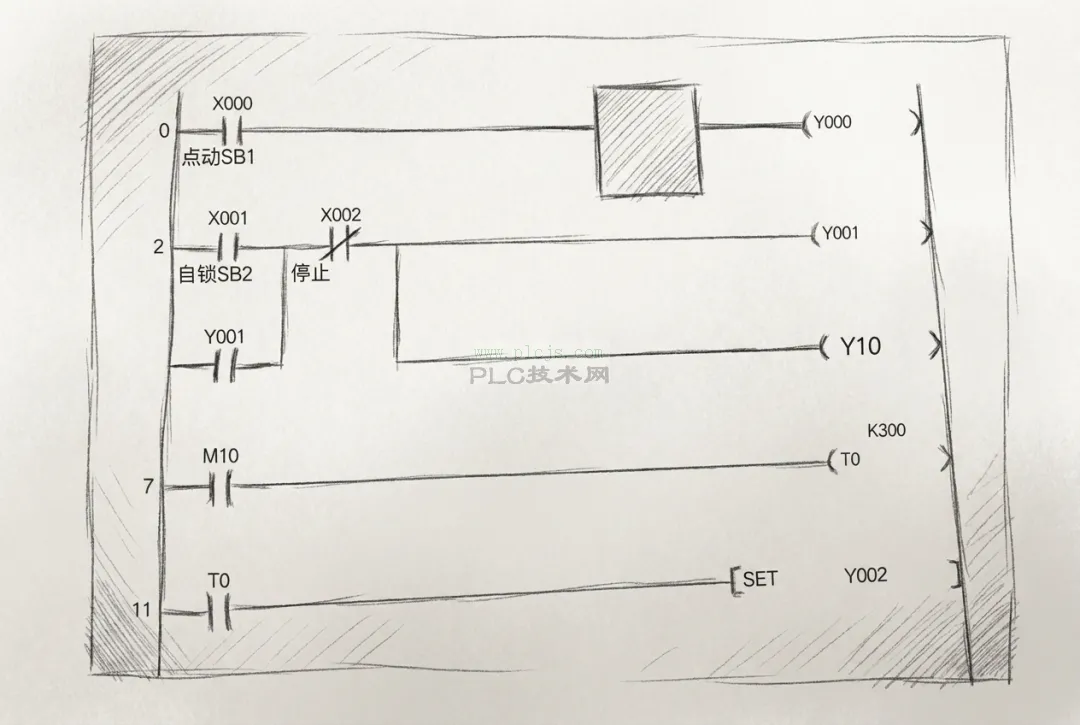
【三菱PLC】通电延时与断电延时应用案例
2026-07-21
-
关于爱马仕Hermes Agent是什么?
2026-07-21
-
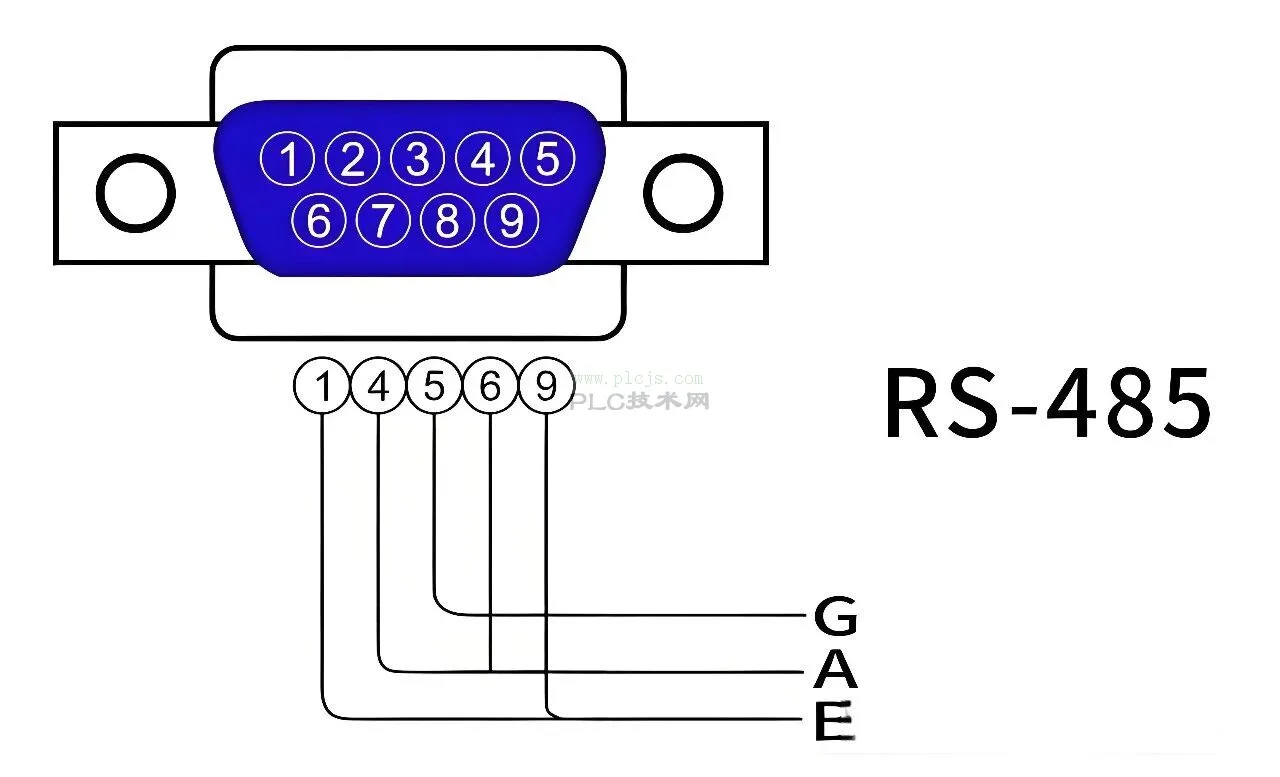
PLC 通讯之王,为什么永远是 485?
2026-07-21
-
PLC 轮询太慢?把采集延迟从 3 秒压到 200ms
2026-07-21
-

24V电源模块:PLC无故重启、模拟量跳变?90%是它在“捣鬼”!
2026-07-21
