-
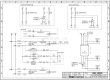
硬件介绍:伺服放大器型号:整流器型号:电机型号:前提条件:确认控制器到的外部轴的电缆已经全部连接完成伺服电机编码器电池安装完毕1.进入维护模式2.进入安全模式密码:5按到底3.进入设置-控制轴组画面选择S1-回 ...
-
免费领取方法在文章最后有说明! 往期精彩回顾限时领取!网友提供的100多G工控学习资料网友收集全网最全的工控视频,限时免费领取全网最详细!一篇文章教会安川机器人伺服焊枪配置某位群 ...
-
线路连接:外部条件:机器人要求,包括:机器人底座固定牢固,焊枪已安装到机器人法兰盘,焊枪电机电源线及编码器线已连接完好。机器人焊枪相关软件包已安装(spot tool+ H590; Servo Gun Axes H869;Servo Gun Optio ...
-
(1)平常板件之类的位置整体移动时、或者使用离线程序时,挨个挨个轨迹点的修改,很废时间、效率太低。这是时候 ...
-
一、什么叫做工件坐标系工件坐标系用于定义工件相对于大地坐标系或者其他坐标系的位置,具有两个作用:一是方便用户以工件平面方向为参考手动操纵调试;二是当工件位置更改后,通过重新定义该坐标系,机器人即可正常 ...
-
①机器人与控制柜连接线缆②机器人介绍③控制柜介绍1/3④控制柜介绍2/3⑤控制柜介绍3/3⑥示教器介绍1/2⑦示教器介绍2/2免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
一、机器人默认坐标系机器人自带的TCP坐标原点一般在第6轴的法兰盘中心,垂直方向为Z轴,符合右手定则,设置TCP坐标的时候把机器人的操作模式调到手动限速模式。二、机器人工具坐标系的作用当机器人夹具更换之后,只 ...
-
1、打开示教器,选择control panel2、选择language3、点击chinese,选择ok4、示教器会弹出弹窗说是否重启,选择yes免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
1、机器人单轴操作运动说明①打开手动操纵②选择动作模式③可以选择轴1-3或者轴4-6,然后点击确定④操纵杆方向显示为1-3或者4-62、控制机器人到各个轴对准刻度3、计数器更新①点击校准②点击ROB_1(校准)③点击手动 ...
-
1、选择控制面板里面的配置2、点击signal3、新建一个名字为kh的信号,为数字输出信号,地址为94、点击确定,会弹出弹窗是否重启,选择是免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合 ...
-
一、添加名字为709-1DeviceNet Master/Slave的板卡二、进行相关配置1、点击控制面板2、点击配置系统参数3、点击DeviceNet Device4、点击添加5、点击默认,选择名称为DSQC 652的板卡进行通讯6、修改addres为10,点击 ...
-
1、打开控制面板2、打开配置系统参数3、点击文件,选择”EIO“文件另存为4、点击确认,选择箭头,EIO.cfg文件将会保存在文件夹中,最后选择确定5、打开文件夹里面的EIO文件,用记事本形式,打开修改如下6、然后把EIO ...
-
1、点击输入输出2、点击视图,选择全部信号,即可对信号进行控制(0:复位,1:置位)免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
1、打开控制面板2、打开配置可编程按键3、选择对应的输出类型4、选择按下按键想要的效果5、选择否,请勿在自动模式下控制信号很危险6、点击确定免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容, ...
-
1、点击手动控制2、点击对准3、选择大地坐标,按下使能,开始对准免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
1、点击重新启动2、点击高级3、重启:重新启动示教器重置系统:初始化所有数据,但不初始化资源管理器中的文件重置RAPID:初始化程序编辑器,删除所有程序恢复到上次自动保护的状态;恢复到上一次备份的状态关闭主计 ...
-
1、选择备份与恢复2、点击恢复系统3、选择恢复系统的文件夹之后,点击恢复4、会弹出弹出弹窗,单击“是”免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
1、选择备份与恢复2、选择备份当前系统3、选择”ABC..."按钮,选择进行存放备份数据路径,单击”..."按钮,选择备份存放的位置(USB设备或机器人硬盘),最后点击备份4、等待备份完成免责声明:如果侵犯了您的权益, ...
-
1、点击手动操纵2、点击转到3、选择对应的点位,按下使能,点击转到免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
1、选择程序编辑器2、选择模块3、单击文件,选择新建模块,弹窗出来点击是4、输入模块名字,单击确定5、选择程序模块,单击显示模块6、选择例行程序7、打开文件,新建例行程序8、将名称main输入,点击确定9、打开文 ...
-
一、导出程序1、点击模块2、选择要保存的模块3、点击文件,选择"另存模块为"4、选定目录后,输入对应的文件名点击确定二、导入程序1、点击程序编辑器2、点击模块3、点击文件,选择加载模块,点击弹窗选择是4、选择对 ...
-
一、什么是LoadData对于搬运应用的机器人,应该正确设定夹具的重量,重心(tooldata)以及搬运对象的重量喝重心数据(loaddata)二、如何设定LoadData1、点击手动操纵2、点击有效载荷3、点击新建4、新建一个名称为load ...
-
1、打开控制面板2、校准触摸屏3、点击重校,根据提示操作即可免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
-
一、modbus软件配置1、点击connection里面的connect2、选择ModbusTCP/IP,点击ok3、选择setup下的Slave Definition4、按如下配置,设置线圈状态,ID地址为1,地址为20,连读20个5、按照下图配置00020-00027全部为1二 ...
-
一、在网上下载一个调试助手,如图设定服务端、IP地址和端口二、机器人如何设定1、添加616-1 PC Interface选项2、用一根网线连接X6 WAN口到交换机,相机用一根网线连接到交换机3、打开控制面板4、点击配置5、点击主 ...
-
一、什么情况需要更新电池当机器人提醒电池低电量警告或38200电池备份丢失时,意味着要进行SMB电池的更换二、更换电池的操作1、把机器人移动到原点位置,为了更换电池之后更新转数计数器2、关闭机器人控制器和总电源 ...
-
一、使用FTP传输机器人文件[/pre][/pre]1、机器人默认为FTP server[/pre](把网线插入机器人service口)[/pre][/pre]2、通过资源管理器进行文件传输[/pre][/pre]3、在文件夹路径输入相关路径:(假设IP段为192.168.1 ...
-
一、系统输入信号二、系统输出信号三、配置信号步骤1、点击控制面板2、进入配置系统参数3、我们在此添加一个系统输入信号,点击System Input4、点击添加5、选择Signal Name,名字为di_start,点击确定6、选择Act ...
-
ABB工业机器人的DeviceNet选项有709-1 DeviceNet Master/Slave和 840-4 DeviceNetAnybus Slave,这两种选项都需要对应的硬件支持。709-1 DeviceNet Master/Slave 选项对应的硬件位置的A处。对应的板卡型号为DSQC1006 ...
-
一、欧拉角的定义机器人的欧拉角是指机器人在三维空间中的姿态。欧拉角通常用三个角度表示,分别是滚动角、俯仰角和偏航角。滚动角表示机器人绕其自身的纵轴旋转的角度,俯仰角表示机器人绕其身的横轴旋转的角度,偏 ...
-
一、Modbus slave软件1、点击connection里面的connect2、点击Modbus TCP/IP,然后点击OK3、点击setup,选择Slave Definition4、查找以下配置,ID号为1,线圈状态,地址为00020,长度为20二、机器人程序编写三、程序 ...
-
1、在ABB示教器中新建一个例行程序,编写TP程序PROC Routine1()[/pre][/pre] TPErase;[/pre][/pre] TPWrite "";[/pre][/pre]ENDPROC[/pre][/pre]2、用某个大神的工具转换一下,例如:为中华之崛起而奋斗, ...
-
一、新建3个子程序,名字前缀均为PPP二、编写以下程序就可以调用三个子程序了MODULE Module1[/pre] PROC main()[/pre] FOR i FROM 0 TO 2 DO[/pre] reg1:=reg1+1;[/pre] %"PPP"+NumToSt ...
-
一、数组定义数组是一种基础的数据结构,用于存储固定大小的相同类型的元素的集合。在编程中,数组可以用于存储一系列数据,比如一组数字或者一系列字符串。ABB机器人所有数据类型都可以创建数组数组最大三维,起始 ...
-
一、先写一部分代码,定义数据类型为老师,里面包括性别,垃圾,绩效,绩效具体内容有月、周MODULE Module1[/pre] RECORD teacher[/pre] bool gender;[/pre] num& ...
-
一、编写代码如下MODULE Module1[/pre] VAR string temp_s;[/pre] VAR num s_len;[/pre] PROC main()[/pre] MMM("Äã½ñÌìѧϰÁËÂð");[/pre] ENDPROC[/pre] PROC MMM(string s)[/ ...
-
1、编写以下代码MODULE Module1[/pre] PROC main()[/pre] start:[/pre] TPErase;[/pre] TPReadFK reg1,"»¶Ó½øÈ룬ÇëÑ¡Ôñ","Åä·½1","Åä·½2","Åä·½3","Åä·½4","Ï ...
-
一、代码如下MODULE module1 [/pre] VAR num pos{9};[/pre] PROC Main() [/pre] VAR jointtarget Jpos; [/pre] VAR robtarget Lpos;[/pre] Jpos:=CJointT(); [/pre] ...
-
一、编写以下程序把97654按位输出,从右到左,代码如下MODULE Module1[/pre] VAR num reg_temp:=0;[/pre] PROC main()[/pre] TPErase;[/pre] reg1:=97654;[/pre] TPWrite"´ÓÓÒÊýµ½ ...
-
一、串口硬件介绍早期控制柜默认配置串口硬件,后期新的机器人控制器取消串口标配,使用前确认是否有这配置如图A处二、相关配置1、点击控制面板2、点击配置3、点击主题里面的communication4、点击serial port5、点击 ...
-
一、代码如下MODULE MODULE1[/pre] VAR string time;[/pre] VAR string date;[/pre] PROC main()[/pre] time:=CTime();[/pre] TPWrite "ÏÖÔÚʱ¼äÊÇ "+time;[/pre] date:=cD ...
-
一、操作步骤1、点击控制面板2、点击配置3、点击singal,选择添加(如果要真实,在之前配置一个DSQC651的板卡)4、如下图配置完成之后,点击确定,会弹出弹窗,否重启5、选择system output,选择添加6、如下图 ...
-
一、打开robotstudio软件,按照下图所示,新建模块二、填写模块名称为zzz,模块和属性选择NOVIEW,点击确定三、效果如下免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
一、为什么要用化名IO?因为可以把不同的IO用统一名称管理起来,不用修改程序,又可以用不同的IO二、系统配置IO三、编写以下代码程序关联IOMODULE Module1[/pre] VAR signaldi signal_di1;[/pre] VAR signaldi sig ...
-
1、编写代码如下MODULE MODULE1[/pre] PROC main()[/pre] rubbish;[/pre] ENDPROC[/pre] PROC rubbish()[/pre] TPWrite"rubbish";[/pre] ENDPROC[/pre]ENDMODULE[/pre][/pre]2、点击控制面 ...
-
废话不多说上代码MODULE MODULE1[/pre] VAR jointtarget joint_temp;[/pre] CONST robtarget p10:=[[346.91,-111.38,594.00],[0.493981,0.133976,0.855599,-0.0773512],[-1,-1,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9 ...
-
一、定义运行时间是机器人动作的时间,非运行时间是机器人不运动、等待时间、等待信号等等。二、操作步骤1、配置一个不工作的信号do_not_moving数字输出信号如下,点击确定2、在系统输出,添加,如图下配置,点击确 ...
-
1、配置四个简单信号如下2、在systeminput里面添加一个如下图所示的配置,点击配置,完成之后重启3、编写代码如下MODULE Module1[/pre] CONST robtarget p10:=[[943.61,0.00,1152.50],[0.5,6.23717E-9,0.866025,3.6 ...
-
一、编写以下代码MODULE Module1[/pre] VAR byte byte1:=0;[/pre] VAR bool b1{8}:=[FALSE,FALSE,FALSE,FALSE,FALSE,FALSE,FALSE,FALSE];[/pre] PROC main()[/pre] byte1 := 255;[/pre] FOR i FR ...
-
1、打开控制面板2、打开配置3、选择主题里面的Motion4、选择Transmission,就可以看到里面数据了5、机器人本体减速比不可修改,外轴减速比可以修改免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内 ...






电梯 2026-05-04
一枚嵌入式码农 2026-05-04
