-
机器人信号指的是通过机器人EE接口接入的信号,输入信号为RI,输出信号为RO。此信号即接即用,无需分配。此信号为布尔量信号。1.EE接口位置使用RIO信号,一般用于机器人末端信号控制。如抓手气缸、吸盘真空信号等。R ...
-
28.自动模式下的信号设定设置为启用,在程序自动运行时,可通过示教器修改输出信号状态(DO/RO/GO)。仅限输出信号。设置为禁用,在程序自动运行时,无法通过示教器修改输出信号状态。修改时,提示“不强制输出处于 ...
-
在发那科机器人系统中,模拟输入信号为AI,模拟输出信号为AO。模拟信号形式是数值(整数)。通过菜单栏“IN/OUT”(F3)可切换输入和输出信号显示。1.AIO和WIO区别WI(输入)、WO(输出)是布尔量信号,即只有ON/OFF ...
-
11.带有确认信号的PROD_START此设置针对PNS程序启动信号UI[18]。此设置需要保证“7.专用外部信号”为启用状态,不然讨论此设置没有意义。PNS程序启动时序:对于输入信号而言,启动PNS时序:PNS 1~8(UI[9]~UI[16]) ...
-
6.所选程序的调用(PNS)此选项并不是针对PNS程序。其设置为启用(默认),在执行冷启动后,程序状态仍为关机前的程序。其设置为禁用,在执行冷启动后,程序状态为无程序选择状态。7.专用外部信号其设置为禁用,表示 ...
-
发那科机器人主程序启动方式主要有三种RSR、PNS和STYLE启动。本文主要介绍PNS启动中,几个关键的设置问题。阅读者需要有一定的实际使用经验,以便更好理解。(一)问题一:启动程序的信号时序信号时序的仿真演示,如 ...
-
44.UOP自动分配一共可以设置以下多个模式。UOP指的是UI/UO信号。完整的UOP信号如下。更改分配方式后,重启生效。只有第一次更改,重启后才会对之执行分配,如果人工重新设置了其他分配方式,此中设置不会因重启重复 ...
-
操作面板信号称为SOP,输入信号为SI,输出信号为SO。此信号是布尔量信号,即只存在ON和OFF两种状态。通过菜单栏“IN/OUT”(F3)可切换输入和输出信号显示。1.何为操作面板?操作面板位于控制柜门上端位置,不同机型 ...
-
FANUC-机器人IO(类型、分配、应用实例)FANUC-IO之单元接口页面FANUC-IO之自定义IO页面FANUC-IO之数字信号DIOFANUC-IO之模拟信号AIOFANUC-IO之组信号GIOFANUC-IO之机器人信号(EE)RIOFANUC-IO之系统信号UIO(UOP) ...
-
在项目调试中,可能会遇到需要将某个输入信号转发给其他设备的情形。输入信号分RI/DI/SI等,分别来自于EE接口、外围设备或元器件、操作面板。比如机器人末端的手爪通过EE接口控制,那么此中信号(如电磁阀接RO、sens ...
-
在发那科机器人系统中,有系统专用信号,即功能固定的信号。系统输入信号为UI,系统输出信号为UO。系统信号是布尔量信号,即只存在ON和OFF两种状态。系统信号又称为UOP,也称为外围设备I/O。所谓的外围设备,是从外 ...
-
48.J7,J8点动键设置J7,J8按键,一般用于组内的附加轴的点动。如J518功能选项的行走轴为组1的附加轴,在状态为“G1”时,J7按键对应行走轴的点动。而,如果存在多组的情况下,我们也可以将G2的轴分配给J7/J8,这样即 ...
-
宏是一个发那科机器人中针对程序执行方式定义的功能。宏程序是将一般的TP程序属性更改,并定义其执行方式。将几个指令组合的程序作为一个指令来便捷执行。宏程序一般应用于组合的特定功能IO指令程序,如夹爪打开或关 ...
-
发那科机器人用户程序存储在主板的内存条中。内存条包含了FROM和SRAM区。一般是128M+3M,或者64M+3M。示教器menu-状态-存储器,可以查看本机内存大小。我们所编写的所有程序都存放在TPP区域中(硬件对应SRAM区域,也 ...
-
一:应用需求有如下两个码垛跺型案例,一个是底层5个,码垛顺序如下编号顺序1~5,且码垛时要求,每一摞码放至顶层后,再码下一摞。即编号1处,如设置层数为4,那么在1处叠放4个后,再至编号2处,叠放4个,再至编号3 ...
-
在示教器按键中,“SELECT”和“EDIT”按键是和程序相关的两个按键。SELECT:快速进入程序列表。EDIT:快速进入最后一次或查看,或编辑的程序,或正在运行的程序。这两个按键实际上是快捷键。SELECT:相当于menu(下 ...
-
FANUC机器人可针对空间固定区域设置TCP监测,通过DO信号反馈工具TCP相对设置的空间区域的位置关系,也可以通过指定的DI信号控制机器人在/进入空间区域。Menu-设置-防止干涉区域,可进入防干涉区域列表。默认可设置30 ...
-
行走轴配置是发那科机器人常见的附加轴配置情形之一。行走轴,又称为导轨轴,解决机器人作业中的行程问题。行走轴的功能代码为J518(Extend Axis Control)。行走轴为了与机器人协调,无法独立一组,需配置于机器人 ...
-
防干涉区内容可回顾以下文章:FANUC-防干涉区功能一般,在机器人动作范围不满足实际作业要求时,会加入附加轴,如变位机、行走轴等。行走轴即导轨,增加机器人的作业范围。行走轴一般通过J518选项配置,配置在机器人 ...
-
协调,即机器人和变位机之间或者机器人和机器人之间的动作始终保持相对运动。协调设置中两个动作组分为主动组和从动组,从动组跟随主动组的运动而进行相对运动。一:仿真中如何添加变位机(以单轴旋转变位机为例)1. ...
-
(六)电机正反转 Motion Sign此设置会改变电机方向,也就是导轨的移动方向。比如,初始设定至为true,导轨向某个方向移动,E值增加,若改为FALSE,导轨向原来方向移动,E值将会减小。Ext Type选择为Integrated Rail ...
-
本文内容以上期文章内容为基础,单轴变位机和双轴变位机配置设置流程类似。回顾单轴变位机协调内容,可点击下方文章链接: FANUC-协调(单轴旋转变位机) 一:仿真中如何添 ...
-
发那科机器人系统除了机器人之外,还可以添加电机,通过设置,所添加的电机可由机器人系统直接控制。例如,电机应用于导轨轴,以增加机器人行程范围;电机应用于变位机(用于工件的位置变化,一般在弧焊应用中),以 ...
-
本文内容以前期文章内容为基础,回顾协调内容,可点击下方文章连接: FANUC-协调(单轴旋转变位机)FANUC-协调(双轴旋转变位机)一:仿真中如何添加变位机流程参阅上期文章内容此案例变位机为组2(G2),沿机器人世 ...
-
如视频,此为三机协调。设置方法可先了解本文双机协调。三机协调设置思路见文末。 您的浏览器不支持 video 标签 协调应用一般是机器人和变位机,但也有是机器人和机器人,也称为双机协调。此处的双机指的是一个控制 ...
-
FANUC-协调(单轴旋转变位机)FANUC-协调(双轴旋转变位机)FANUC-协调(线性变位机)FANUC-协调(双机器人协调dual arm)免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
发那科仿真软件中,行走轴的创建,有快捷方式,也可以自行建立简易的行走轴。方法一:快捷方式(J518)任意创建一个新项目。无需特别勾选功能选项,按照默认功能创建即可。在菜单栏的工具栏中,找到“生成行走轴”。 ...
-
宏是一个发那科机器人中针对程序执行方式定义的功能。宏程序是将一般的TP程序属性更改,并定义其执行方式。将几个指令组合的程序作为一个指令来便捷执行。宏程序一般应用于组合的特定功能IO指令程序,如夹爪打开或关 ...
-
发那科机器人与速度相关的设置及变量有很多。速度又分为运动指令中的速度、系统内部速度及全局速度。本辑主要聊一聊,发那科全局速度相关设置及变量。全局速度也就是指示教器状态栏显示的速度倍率,它是基于机器人最 ...
-
一:功能需求描述在多数应用场景中,集成设备时,都由PLC主控,通过PLC与机器人交互UI信号实现目标程序的调用。而现场如果没有PLC或未接信号交互按钮,一般选择本地启动。本地启动方式,需要人员先在程序列表中选择 ...
-
上期了解到发那科机器人与PLC的几种常见的通讯方式。本文着重阐述发那科机器人IO类型、IO分配及相关问题。IO分配的过程实际就是指定编号的DI和DO的通讯方式及信号映射关系。 (一)发那科机器人有哪些IO ...
-
前面的文章介绍了影响发那科机器人整体倍率的相关设置及变量。发那科机器人速度还有一种设置,就是速度变化设置。一般情况下,我们通过速度“+”“-”键,速度:微速à低速à1%à2%à3%à4%à5%à10%······· ...
-
发那科机器人与速度相关的设置及变量有很多。速度又分为运动指令中的速度、系统内部速度及全局速度。本辑主要聊一聊,发那科全局速度相关设置及变量。FANUC-机器人速度相关设置及变量(一)FANUC-机器人速度相关设置 ...
-
一:功能需求描述客户现场,机器人手持打磨头对工件打磨。打磨工具的启动与停止,通过DO信号控制,为ON即启动,为OFF即关闭。但实际调试时,如果机器人在打磨时,因故障,机器人停止,但是控制打磨工具的DO状态仍保 ...
-
四:$SCR.$JOGOVLIM说明:此变量用于限定机器人在示教器为ON时机器人的最高速度倍率。示教器为OFF时,此变量值不会限制机器人示教器调整速度倍率。此变量需要在控制启动模式下修改。相关问题现象:在示教器为ON时, ...
-
发那科机器人有一个特殊的参数--变量。诸多功能启用或禁用、参数等,都需要通过变量设置或反馈。变量整体参数存储在文件SYSVARS.SV中,不同机器人间(哪怕是同型号同配置)尽量不要互导此文件,否则会产生系统报警问 ...
-
机器人所说的速度,一般都是指的TCP速度。TCP就是工具坐标系的原点。默认的TCP在机器人法兰中心。法兰就是机器人J6轴的中心。我们在程序中所写的运动语句(L运动类型)中的速度指的就是TCP速度。需要明白的是,程序 ...
-
在发那科IO中,还有两个特殊的开关量标志F和标记M。标志F页面通常为显示状态。而标记M一般为隐藏状态,需要将变量$MIX_LOGIC.$USE_MKR设置为TRUE,方可显示。更改即改即生效。一:标志F1)如何将F关联UIO、DIO等?F ...
-
发那科机器人有若干参数设置页面可通过或需要通过某对应变量设置实现隐藏与显示。各页面的隐藏与显示主要通过变量设置实现,若对变量意义不太熟悉,可点击下文回顾: FANUC-机器人变量 & ...
-
一:应用需求描述机器人一共四个作业区。1为拆跺区,此区拆跺点位由相机给出,相机固定安装在此区域上方。2为上料区。3为下料区。4下料区(码垛)。实际作业时,1区取至3区放,2取区4区放。程序分成四个动作程序(1 ...
-
前言常规的发那科机器人程序,是按序执行,即只能执行当前程序逻辑。而实际上应用过程中,我们需要同步执行多个逻辑,以发挥监控某信号、计算某逻辑等作用。本文将介绍发那科机器人多任务同步执行的几种方式。(一) ...
-
关注小潘,带您复制粘贴优秀的程序板卡型号:A17B-8102-01001、概述PROFINET I/O 是基于工业以太网的一种通讯方式,可以作为从站与主站(例如PLC),作为主站与周边设备(例如焊机)进行实时通讯。其中FANUC 板卡的P ...
-
如果需要原文档,请联系只会复制粘贴的小潘免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
常规的布尔量信号,如DI/DO,只有ON、OFF两种状态。如果需要传输数值,需要使用模拟信号、或者组信号。模拟信号AIO方式只有硬接线。而GIO可以通过通信协议。在发那科机器人系统中,输入组信号为GI,输出组信号为GO。 ...
-
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
-
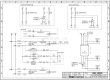
Compact Plus-控制柜结构Compact Plus-控制柜目前是SCARA 机器人使用,下图所示为Compact Plus-控制柜外观。Compact Plus -控制柜JRM18 安全接口Compact Plus-控制柜安全接口与外围通讯信号都在JRM18 接口,使用FANU ...
-
(1)平常板件之类的位置整体移动时、或者使用离线程序时,挨个挨个轨迹点的修改,很废时间、效率太低。这是时候 ...
-
FANUC机器人常用启动方式有5种 : RSR、PNS、STYLE 、宏触发、F旗号但这5种里面程序运转方式有区别的是宏触发,其中RSR、PNS、STYLE是比较常用的这里我主要介绍PNS码这种方式。1.PNS程序名和IO选择程序说明程序 ...
-
KUKA的备选软件包(KUKA Option Package),简称KOP文件,是用来扩展KUKA机器人的功能或满足特定项目需求,各类工艺包如涂胶、点焊、弧焊、码垛包等,各类通讯如Ethernet、Profinet等等。选项包是KUKA官方付费软件, ...
-
机器人需要与各种各样的设备进行现场总线通讯,该如何选择?ABB机器人提供了丰富的现场总线接口,兼容市面上主流的DeviceNet、Profibus、Profinet、EtherNetIP、CC-Link等国际通用协议,主要以下面三种方式呈现,在 ...






电梯 2026-05-04
一枚嵌入式码农 2026-05-04
