



- 0基础学电工 第3天 入行必学的电气元件(1)
- 一支电自己就能搞定各种家庭电路,备一直电笔可以节省几百的维修费
- 0基础机器人 ABB机器人之 MoveJ MoveC MoveAbsJ运动指令 最详细教程
- 手把手 ABB机器人关节入门操作,3分钟学会如何操作机器人
- 0基础PLC 三菱FX3U 3轴机械手码垛案例实战编程-第二课(触摸屏编写和定位参数设置)
- 0基础 PLC FX3U系列模拟量输入和输出标准化程序案例,项目直接套用
- 0基础PLC 三菱FX3U 3轴机械手码垛案例实战编程-第五课(自动运行程序编写-2)
- 0基础PLC 西门子1200进阶 伺服步进控制综合篇 项目设计合集-第三篇(运动控制标准块建立-2)
- 0基础PLC 三菱全系十几种通讯方式标准程序(例:FX3U主从站、Q系列CCLINK 总线)其他通讯标准程序底部可查看
- 0基础PLC 三菱FX3U与3台E740变频器Modbus通讯轮询控制 案例项目合集 第一篇(PLC编程+接线图+参数设置)

 下一主题
下一主题热点推荐 更多
-

0基础学电工 第3天 入行必学的电气元件(1)
2026-06-11
-

一支电自己就能搞定各种家庭电路,备一直电笔可以节省几百的维修费
2026-06-11
-

0基础机器人 ABB机器人之 MoveJ MoveC MoveAbsJ运动指令 最详细教程
2026-06-11
-
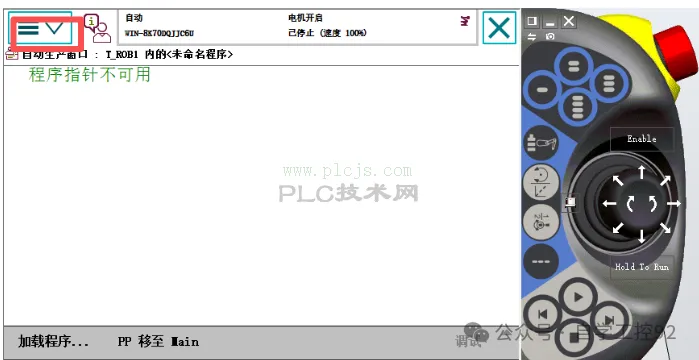
手把手 ABB机器人关节入门操作,3分钟学会如何操作机器人
2026-06-11
-
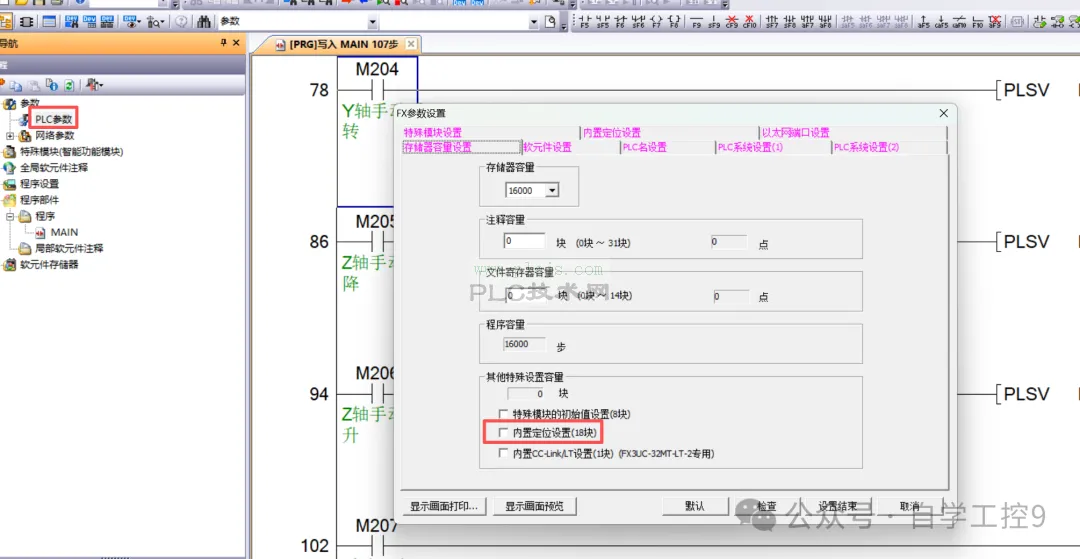
0基础PLC 三菱FX3U 3轴机械手码垛案例实战编程-第二课(触摸屏编写和定位参数设置)
2026-06-11
-
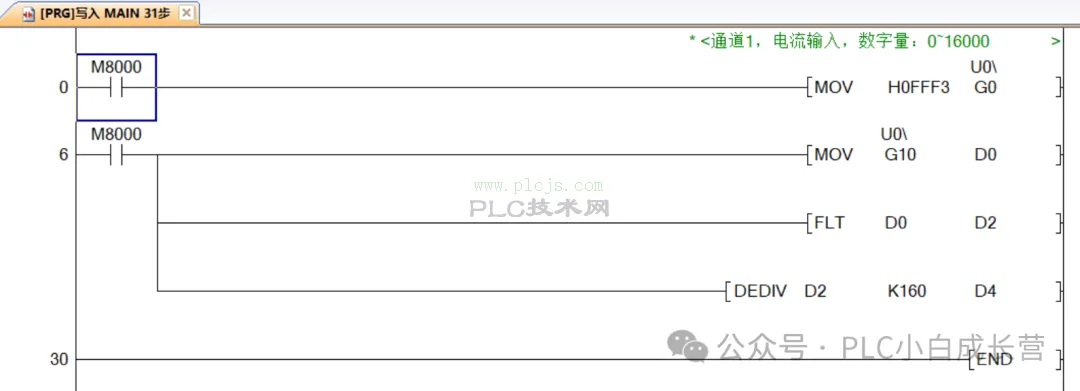
0基础 PLC FX3U系列模拟量输入和输出标准化程序案例,项目直接套用
2026-06-11
-
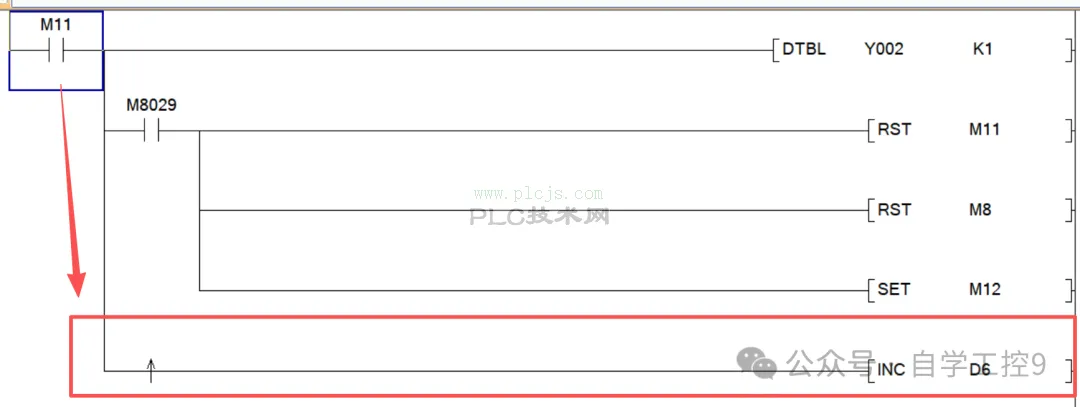
0基础PLC 三菱FX3U 3轴机械手码垛案例实战编程-第五课(自动运行程序编写-2)
2026-06-11
-
3分钟搞懂ABB机器人的线性操作,0基础必看
2026-06-11
-
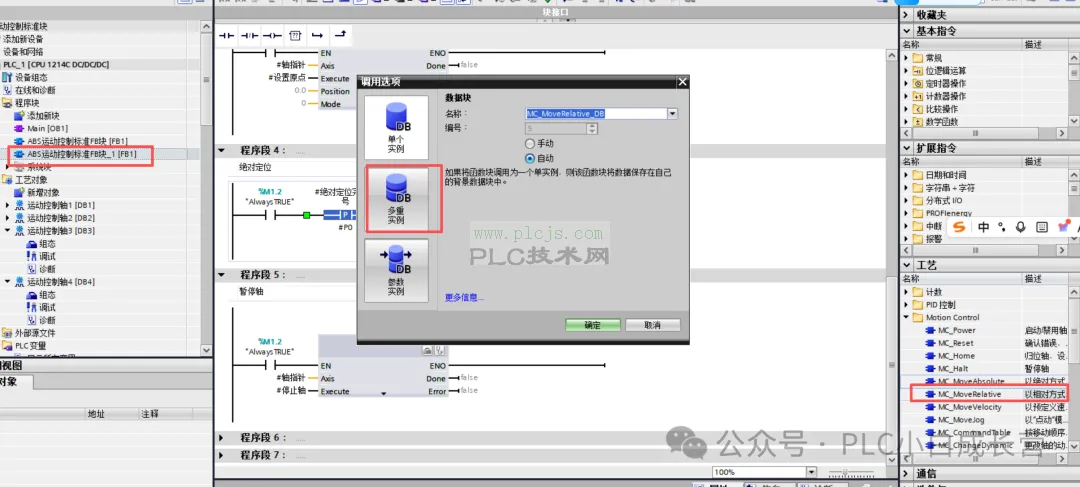
0基础PLC 西门子1200进阶 伺服步进控制综合篇 项目设计合集-第三篇(运动控制标准块建
2026-06-11
-

展会预告|欧姆龙将亮相2026 FoodPack & ProPak,助力食品包装数智转型
2026-06-11
