



- Modbus、CC-Link、以太网|三菱PLC通讯最强攻略,一文讲透
- 一次学透FANUC机器人通讯设置:Ethernet/IP、DeviceNet、Profinet三大协议实战对比
- FANUC机器人最常用的20个IO信号配置,收藏这篇,下次调试FANUC机器人时直接对照着查,少走弯路!
- 揭秘 FANUC R-30iB Mate 控制装置:从正面接口到内部主板,你想知道的都在这
- 手把手教你玩转FANUC机器人的机架 89,搞定机器人与 PLC 的 I/O 逻辑映射
- 详解发那科机器人Deadman开关的三段式逻辑,程序员进栅栏的安全法则
- 详解 PNS 与 RSR 自动启动奥秘,解锁机器人全自动运行新姿势!
- FANUC 机器人零点标定全流程指南
- FANUC工业机器人日常点检:如何清洁过滤器、更换主板电池及检查风扇电机?
- FANUC 机器人与 PLC的EtherNet通信

 下一主题
下一主题热点推荐 更多
-

PLC控制理论----三菱CCLink IE Field Basic总线简介
2026-05-27
-
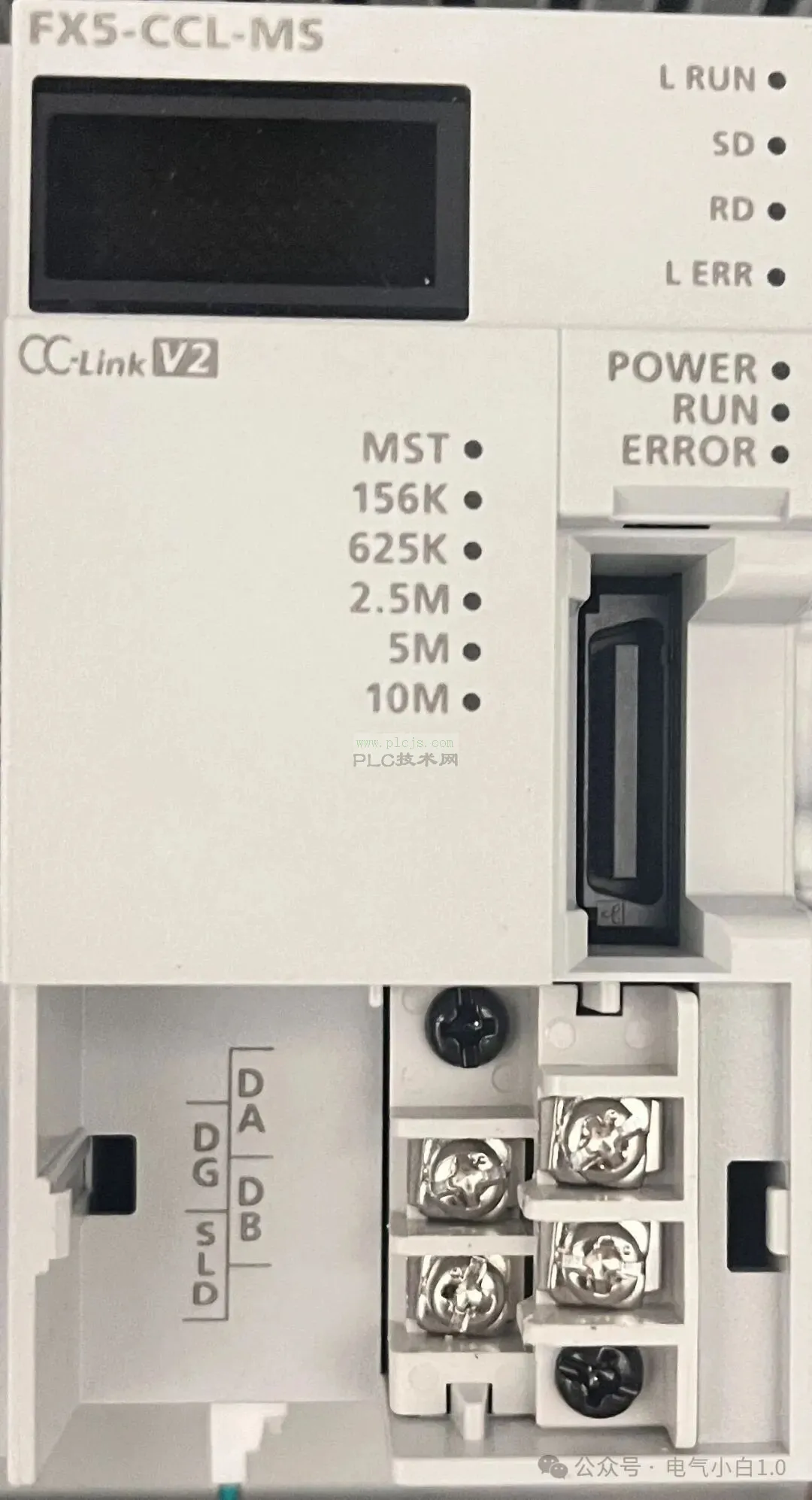
手把手教你如何配置三菱FX5U PLC CC-Link通讯(一)
2026-05-27
-
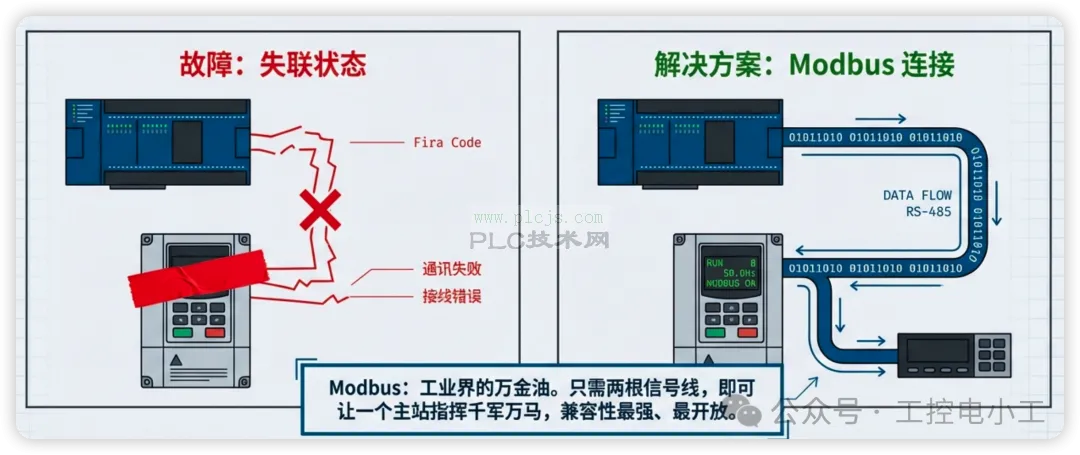
Modbus、CC-Link、以太网|三菱PLC通讯最强攻略,一文讲透
2026-05-27
-

国王授勋!HMS CEO 荣获瑞典商业奖章
2026-05-27
-
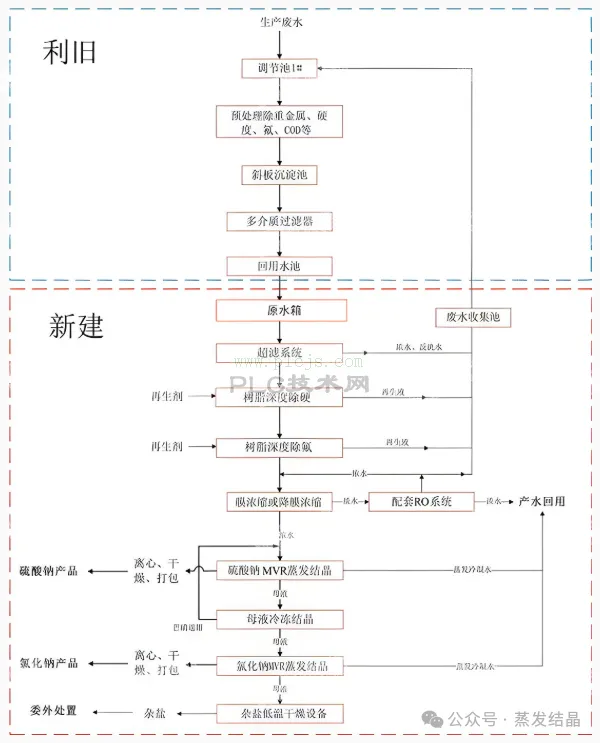
金铅锌冶炼850t/d废水零排资源化利用项目招标技术文件
2026-05-27
-
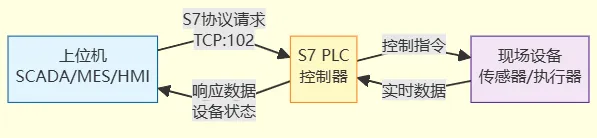
S7协议在关键信息基础设施中的应用实践:从智能制造到能源管控的安全部署策略
2026-05-27
-
想来指南车学自动化,这几个问题你一定要知道
2026-05-27
-

指南车工业机器人应用工程师课程体系大升级,真实项目教学!
2026-05-27
-

制造业里年薪超30W的人都有什么共同点?欢迎补充!
2026-05-27
-

指南车用智能制造生产线教学?有哪些设备?大揭秘!
2026-05-27
