-
点击上方“正运动小助手”,随时关注新动态!梯形图(LAD, LadderLogic ProgrammingLanguage)是PLC使用得最多的图形编程语言,被称为PLC的第一编程语言。梯形图语言沿袭了继电器控制电路的形式,梯形图是在常用的继 ...
-
点击上方“正运动小助手”,随时关注新动态! 您的浏览器不支持 video 标签 电子齿轮模式能够将两轴或多轴联系起来,实现精确的同步运动,从而替代传统的机械齿轮连接。被跟随的轴称为主轴,跟随的轴为 ...
-
点击上方“正运动小助手”,随时关注新动态!XPLC006E功能简介0XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。XPLC006E自带6个 ...
-
点击上方“正运动小助手”,随时关注新动态!EIO16084扩展模块的使用分为如下几步,硬件接线;总线初始化建立总线通讯连接,初始化中执行扩展资源的映射,分别配置轴资源和IO资源;扩展资源配置完成可通过控制器端访 ...
-
点击上方“正运动小助手”,随时关注新动态!今天,正运动小助手给大家分享一下运动控制器之ZMC420SCAN的控制振镜运动。一ZMC420SCAN硬件介绍1.功能介绍ZMC420SCAN总线控制器支持ECAT/RTEX总线连接,支持最多达20轴 ...
-
点击上方“正运动小助手”,随时关注新动态!XPLC006E功能简介0XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。XPLC006E自带6个 ...
-
点击上方“正运动小助手”,随时关注新动态!今天,正运动小助手给大家分享一下运动控制器之ZMC420SCAN的位置同步输出PSO在激光振镜加工中的应用。一ZMC420SCAN硬件介绍1.功能介绍ZMC420SCAN总线控制器支持ECAT/RTEX ...
-
点击上方“正运动小助手”,随时关注新动态!今天,正运动小助手给大家分享一下运动控制器之ZMC408SCAN的硬件接口。一ZMC408SCAN硬件介绍1.功能介绍ZMC408SCAN总线控制器支持EtherCAT总线连接,支持最多达8轴运动控 ...
-
点击上方“正运动小助手”,随时关注新动态!XPLC006E功能简介0XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。XPLC006E自带6个 ...
-
点击上方“正运动小助手”,随时关注新动态!本节主要介绍XPLC006E多轴经济型EtherCAT总线运动控制器控制EtherCAT总线驱动器的方法,分别介绍硬件接线方法,控制器与EtherCAT总线驱动器如何通讯,EtherCAT总线驱动器 ...
-
点击上方“正运动小助手”,随时关注新动态!内容回顾回顾上节课程我们对运动控制+机器视觉的Demo的系统人机界面和主线程的框架进行了大致的介绍,接下来我们将对各个模块的实现过程进行介绍,方便大家理解掌握。今 ...
-
点击上方“正运动小助手”,随时关注新动态!内容回顾回顾之前课程我们对运动控制+机器视觉例程Demo的相机标定和形状匹配两大模块进行了大致的介绍。目前我们已经基本上讲完了所有功能模块。接下本期课程讲解一下如 ...
-
点击上方“正运动小助手”,随时关注新动态!XPLC006E功能简介0XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。XPLC006E自带6个 ...
-
点击上方“正运动小助手”,随时关注新动态!XPLC006E功能简介0XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。XPLC006E自带6个 ...
-
点击上方“正运动小助手”,随时关注新动态!今天,正运动小助手给大家分享一下运动控制卡之ECI3808的硬件外设读写并配合ZDevelop诊断。一ECI3808硬件介绍1.功能介绍ECI3808系列控制卡支持最多达 12 轴直 ...
-
点击上方“正运动小助手”,随时关注新动态!本节内容主要包括以下几个部分,支持PSO功能的硬件、PSO技术的特点、在运动控制器上使用哪些命令实现PSO功能、PSO使用的案例说明。看完本节内容,相信大家就能了解PSO的 ...
-
点击上方“正运动小助手”,随时关注新动态!本节我们主要去讲解一下多种PSO模式原理和使用的讲解,用户可根据实际需求灵活选择触发模式。ZMC460N双总线控制器一硬件说明硬件选型的首要要求是支持PSO功能,再分析PSO ...
-
点击上方“正运动小助手”,随时关注新动态!上节课程我们讲述了多种PSO模式原理和使用方法,本节课程我们主要讲解一下如何使用PSO功能实现高精度等间距输出。ZMC460N双总线控制器一硬件说明硬件选型的首要要求是支 ...
-
点击上方“正运动小助手”,随时关注新动态!为了方便用户了解ZMC408SCAN,本节课程主要给大家介绍一下开放式激光振镜运动控制器ZMC408SCAN的硬件接口与功能。01功能简介ZMC408SCAN是正运动技术新推出的一款支持Ethe ...
-
点击上方“正运动小助手”,随时关注新动态!上一节介绍了ZMC408SCAN控制器的功能、硬件参数与硬件接口的特点等,本节主要介绍激光相关的接口与如何实现激光的控制。激光控制可采用LASER激光电源接口,或通过EXIO扩 ...
-
点击上方“正运动小助手”,随时关注新动态!上一节介绍了控制器的功能、激光控制接口等,本节主要介绍如何实现激光打标控制。本节以光纤激光器为例,采用控制器的LASER激光电源接口连接光纤激光器,配合脉冲轴的运 ...
-
点击上方“正运动小助手”,随时关注新动态!上一节介绍了控制器的功能、硬件参数与硬件接口的特点等,本节主要介绍激光相关的接口与如何实现激光能量的控制。本节以FIBER类型的激光器为例,采用控制器的 EXIO扩展接 ...
-
点击上方“正运动小助手”,随时关注新动态!上一节介绍了控制器的激光相关的接口与如何实现激光的控制。本节介绍ZMC408SCAN控制激光振镜的方法。01激光与振镜功能简介ZMC408SCAN是正运动技术新推出的一款支持EtherC ...
-
点击上方“正运动小助手”,随时关注新动态!今天,正运动小助手给大家分享一下运动控制卡之ECI3808的硬件接线和如何进行MFC的上位机开发。一ECI3808硬件介绍1.功能介绍ECI3808系列控制卡支持最多达 12 轴直线 ...
-
上海工博会现场播报正运动技术 展位6.1H-E261 NEWS”9月19日,期待已久的2023上海工博会今天拉开帷幕了!正运动技术携自主自研、自主可控的运动控制解决方案和高性能软硬产品盛大亮相本次上海工博 ...
-
点击上方“正运动小助手”,随时关注新动态!ZMC406硬件介绍ZMC406是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱 ...
-
点击上方“正运动小助手”,随时关注新动态!众所周知,Python作为一门面向对象的新兴开发语言,具有非常完善的基础代码库,更注重实用,同时代码可读极强,编写完程序即可直接运行,被越来越多的人广泛将它用于机器 ...
-
点击上方“正运动小助手”,随时关注新动态!今天,正运动小助手给大家分享一下EtherCAT运动控制卡的自定义运动曲线,主要介绍一下如何通过在线命令封装自己想使用的Basic指令到上位机接口中供上位机调用。一、ECI282 ...
-
点击上方“正运动小助手”,随时关注新动态!今天,正运动技术为大家分享一下《运动控制卡在ROS上的应用(上)》。本文从ROS应用背景讲起,再讲Ubuntu18.04安装ROS Melodic详细过程,最后通过ROS编程案例——消息发 ...
-
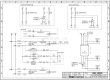
一、引言Factory IO软件大家应该略有耳闻,它是一个学习自动化编程的3D仿真软件。该软件可以与PLC进行通信,并通过程序控制场景的运行。该软件支持通信类型如图1所示。图 1 Factory IO支持的通信类型可以看到在通信 ...
-
一、软件硬件版本 1.1硬件汇川侧控制器:汇川 AM401 1608TP/TN西门子侧控控制器 : CPU 1511T-1 PN1.2软件汇川PLC 编程软件:inoproshop 版本:1.7.3西门子PLC软件:TIA博图V17 二、设备连接及 ...
-
我们做通讯时,常常要将变量转成字节数组,拷贝进入发送缓冲区(也是字节数组),再进行发送。接收端的变量切分必须准确,否则,收到后也无法正确解析。由于存在字节对齐的规则,我们查看结构变量的字节大小时,常常 ...
-
在对汇川中型PLC AM401的一次调试过程中,突然出现了CPU停止运行的情况:CPU的RUN灯熄灭,底部“程序加载-异常”红色闪烁。查看手册,上网搜索都找不到任何线索。CPU使用率、内存使用率都不高,肯定不是资源问题。PL ...
-
一、指针非法访问■ 异常现象◆ AM 系列 LED 数码管显示停止刷新(正常情况显示“00”),AC 系列液晶显 示屏显示内容“Runtime crash”。◆ 编程软件无法扫描到相应的 PLC 设备,PLC 重新上电后正常,运 ...
-
一、伺服相关部分配置1.1伺服相关版本SV660N 试机建议使用“SV660N-Ecat_v0.09.xml”及以上设备描述文件。SV660N 单板软件版本建议为“H0100=901.4”及更高版本号。1.2相关参数说明SV660N 对象字典中 60FD 的 ...
-
前序EtherNet/IP 协议作为工业以太网三剑客之—,目前已经已成为成熟最完整的工业协议之—,今天我们就来讲下汇川PLC如何与安川机器人进行EtherNetIP通讯。一、 机器人侧EtherNetIP 设定1.按面板【主菜单】键并给机 ...
-
在工业自动化领域,PLC作为核心控制设备,其技术实力直接决定制造业竞争力。2025年,汇川、和利时、信捷、禾川四大国产PLC品牌凭借差异化优势争夺行业话语权。本文从技术路线、行业应用及挑战三方面展开分析。一、汇 ...
-
各位汇川技术大神我用的H3Uplc以太网通讯IT7070E触摸屏怎么试通讯不上,哪位大神可以帮忙指导一下是哪里的问题?子网掩码255后边三位零不行,就把子网掩码换成255点0点0点0不是192 168 0.1?免责声明:如果侵犯了您 ...
-
文末有55个实战案例资料导读:在工业自动化领域,可编程逻辑控制器(PLC)作为核心控制设备,一直扮演着至关重要的角色。西门子、三菱和汇川作为全球及中国市场的三大主要玩家,各自在技术、市场和应用领域展现了独 ...
-
最近接了一个项目使用全套汇川产品,PLC、伺服、HMI、IO子站等。第一次使用汇川PLC,伺服驱动器里面的参数设置全是用功能码代替的,如果没有功能码说明书来解释完全搞不懂啊。欢迎使用汇川产品的朋友来讨论。#自动化 ...
-
【导读】西门子PLC如何与V90伺服,进行PN通讯与定位控制呢?来看视频学知识吧。学习收获熟悉西门子PLC编程软件的使用方法掌握V90伺服调试软件的使用与参数配置方法掌握西门子 SMART PLCSINA_POS指令库的使用方法课程 ...
-
一、前序汇川 iFA Evolution 全场景智能化工业控制软件平台于2025年2月发布上线。该平台由汇川历时五年自主研发,覆盖从执行层到控制层的高效组态、编程、仿真和调试功能,并具备编程、监控和控制能力,实现物 ...
-
一、前序汇川 iFA Evolution 全场景智能化工业控制软件平台于2025年2月发布上线。该平台由汇川历时五年自主研发,覆盖从执行层到控制层的高效组态、编程、仿真和调试功能,并具备编程、监控和控制能力,实现物 ...
-
-Begin-大家好!我是付工。汇川 iFA Evolution 全场景智能化工业控制软件平台于2025年2月发布上线。今天跟大家分享如何基于iFA搭建汇川PLC仿真环境及其PLC通信测试。创建项目首先通过iFA创建一个新的项目,名称自定 ...
-
-Begin-大家好!我是付工。汇川 iFA Evolution 全场景智能化工业控制软件平台于2025年2月发布上线。今天跟大家分享如何基于iFA搭建汇川PLC仿真环境及其PLC通信测试。创建项目首先通过iFA创建一个新的项目,名称自定 ...
-
文末有55个实战案例资料导读:在我们自动化设备中,通常会使用PLC来控制变频器。控制变频器有好几种方式,其中包括端子控制、模拟量控制、通信控制等,而模拟量控制更是简单、高效,使用也非常广泛。那本文就一起来 ...
-
-Begin-大家好!我是付工。汇川 iFA Evolution 全场景智能化工业控制软件平台于2025年2月发布上线。今天跟大家分享如何基于iFA搭建汇川PLC仿真环境及其PLC通信测试。创建项目首先通过iFA创建一个新的项目,名称自定 ...
-
1,以汇川AM521 PLC为例,在网络组态中点击PLC然后选中EtherCAT主站。2,右键ETHERCAT1然后点击添加设备添加两个汇川SV660N驱动器轴。3,新添加一个POU,配置在ETHERCAT1任务中。4,在新建的POU中添加轴1和轴2的使能 ...
-
【导读】 PLC工程师们,你们使用伺服做自动化设备调试与控制时,是否听说过STO这个词?什么是STO?她有什么作用呢?如果你还不知道答案,请往下看小编的科普知识。 什么是STO? ...
-
点击蓝字关注我们有时我们关注的公众号消息比较多,错过了一些自己喜欢的消息,不能及时看到工控论坛的推送,我们可以给公众号加星标或置顶。那如何星标置顶呢?【打开一篇工控论坛公众号的文章,点击文章标题下方的 ...





电梯 2026-05-04
一枚嵌入式码农 2026-05-04
