-
对技术不感兴趣也来八个卦。免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
-
叶老师不学无术不走正道日常最喜欢学用可乐擦不锈钢的旁门左道。这次用ACCSET解决了一个客户的问题竟然也可以!笑死了大家参考一下吧。ABB机器人RAPID指令ACCSET简介在ABB机器人的RAPID编程语言中,ACCSET[/pre]指令 ...
-
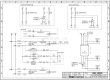
机器人系统基于安全的要求,需要与安全保护装置进行可靠的连接,例如门互锁开关、安全光栅等。以常用的机器人工作站的门互锁开关为例,当门被打开时,则机器人停止运行,避免造成人机碰撞伤害;ABB机器人控制器中的 ...
-
在工业现场中,压力、位移、温度、流量、转速等各类模拟量传感器因设计使用的技术方法不同。传感器工作配电的方式主要分为两线制和四线制,其输出的模拟信号也各有差异,而常见的有0-20mA、4-20mA电流信号和0-75mV、 ...
-
看看网友的聊天和遇到的问题,用得比较多的PLC是三菱,也有不少的人用欧姆龙,因为有不少的网友找我要欧姆龙的软件和资料。【经验分享】PLC与各种传感器连接方案【西门子干货】西门子200+1200教学学点PLC,为以后机 ...
-
有群友问我,不同大小的字体识别不出来,处理是不是把大的字体干掉就是把小的字体干掉,总之就是处理不出来,得不到想要的结果他把图片发给我,我帮他做出来了在这里也分享给大家,供大家学习下下面是部分源代码图片 ...
-
Visual Studio串口通讯与测控应用编程实践每小章包括的内容01 下位机端测控程序设计02 PC端采用VB.NET(SerialPort控件)实现温度测控03 PC端采用VB.NET(MSComm控件)实现温度测控04 PC端采用VC++.NET(SerialPort ...
-
最近有不少网友在讨论halcon如何与c#联合的问题,为了让大家在学习的过程学得更快,学习信心更大,小师妹我专门整理了下联合的方法,供大家参考,有不对的地方或不足之处请指正,谢谢注意:小师妹为你准备好了文档, ...
-
1如今这个时代,越来越多人都想离开繁华的城市,选择一种面朝大海、春暖花开的生活,想环游世界,想寻找自由。还有很多年轻人总是奢望能过上这样的生活:钱多事少离家近,位高权重责任轻;睡觉睡到自然醒,数钱数到 ...
-
AI技术发展的三大支柱:“算法+大数据+计算能力”,算法是人工智能发展的核心关键之一,很多技术环节和系统功能的实现都依赖于算法的精准度,算法的优劣直接影响了人工智能的发展方向。那么我们当下感受到的人工智 ...
-
最近工业机器人市场上,调试工作比较火爆,单个项目动辄几十台机器人同时调试,开出的日薪达到1500-2000元。拥有如此庞大的市场需求和丰厚收入的工作,到底有多难呢?如同新买的手机,我们第一时间做的不是用它打电 ...
-
前面小师妹给大家分享了(红色的为资料,可以下载)【干货分享】KUKA机器人视频+PPT+资料 【限时领取】ABB机器人培训视频+PPT课件+学习资料【干货免费送】FANUC机器人学习视频+资料有不少网友表示:资料 ...
-
文末福利西门子1200/1500学习资料1、安装博图的前提一定是要关闭所有的杀毒软件,包括windows自带的杀毒软件(win10需要把实时保护关闭)。 2、找到安装程序的start.exe文件,右键以管理员身份运行。&nb ...
-
有不少网友表示,单视觉有太好玩,来点联合的、机器人的、PLC的,跟视觉能通讯上的,这样学起来就更好了;记得前面有分享过C#联合halcon的c#联合halcon就是这么简单,没你想得那么难PLC的三菱plc图文并茂的案例那里 ...
-
在前面分享的【限时领取】ABB机器人培训视频+PPT课件+学习资料,表示不错,但有部分网不是用ABB机器人做项目的,所以小师妹又从网上找了好久的资料,找到了四大家族中的库卡机器人案例视频【限时领取】20种工业机器 ...
-
一、简述多年来,可编程控制器(以下简称PLC)从其产生到现在,实现了接线逻辑到存储逻辑的飞跃;其功能从弱到强,实现了逻辑控制到数字控制的进步;其应用领域从小到大,实现了单体设备简单控制到胜任运动控制、过 ...
-
XLD识别,也就是轮廓识别说白了,就是圈出你想要的区域轮廓识别在专门的算子这个大家不用担心还有就是小编会毫无保留地告诉你不只有源码这么不地道还给你做了注释哦根据下面的方法去领取源码这样你就会知道这个识别 ...
-
Blob分析是对图像中相同像素的连通域进行分析,该连通域称为Blob。经过二值化处理后的图像中色斑可认为是blob。Blob分析工具可以从背景中分离出目标,并可以计算出目标的数量、位置、形状、方向和大小,还可以提供相 ...
-
简单介绍下二维码,它最早发明在日本,用特定的几何图形按一定规律分布能通过图象输入设备或光电扫描设备自动识别其信息halcon目前支持三种二维码:ECC 200、QR Code、PDF417二维码的特点:高密度编码、信息容量大编 ...
-
膨胀,增加相素腐蚀,减少相素开运算,先腐蚀后膨胀,减少相素闭运算,先膨胀后腐蚀,增加相素在用算子的时候就要注意了它用圆形结构元素、矩形结构元素还在注意算子最后的那个参数因为它是调试的重要参数它是控制相 ...
-
有朋友问我,在halcon中怎么打开相机?相机怎么会报错?如何是笔记本可以打开自带的相机,方法和打开工业相机一样的。注意:有工业的朋友,你在安装相应的相机驱动才能打开。相机打开后必须要关闭,不然下次打开会报 ...
-
文字识别大家会不会感觉到很难?小编就给你编个源码,让你看看难不难?其实啊,不会还是有点难的。。。。。。。识别这个东西重要的还是思路你把思路搞清楚了就成功三分之一了编程也占三分这一剩下的三分之一小编也没 ...
-
缺陷检测在很多地方都会用到检测缺陷的方法很多小编给的是入门的检测方法先把好的产品做成模板,保存好然后读取其它产品来检测根据对比来判断所检测到的产品是否合格这个合格的范围可以自己设置的根据你缺失多少面积 ...
-
区分不同的人是很多智能系统的必备能力。为实现此目的,一种可能的技术手段是通过对人脸的光学成像来感知人、识别人,即所谓的人脸识别技术。经过几十年的研发积累,特别是近年来深度学习技术的涌现,人脸识别取得了 ...
-
为了让你更快地、更有效地保留内容,方便以后学习,小师妹特意为您准备了文档,你直接领取就好 领 取 方 法具 体 步 骤1.长按下方二维码识别关注或微信关注公众号 ind400(机器人配视觉)2.进入公众号,点 ...
-
双模板匹配是在单模板匹配的基础上再进一步识别的这样有你要识别两个模板的时候就可以用这样会方便很多一般方法是做模板,训练模板,识别,显示结果以下是部分源码图片注意:小编还为你准备了多张图像供你识别,在源 ...
-
几何定位的优点几何定位工具又叫做几何匹配,基于物体的形状、边缘、轮廓等几何信息进行定位优点一、支持非线性光照变化,对物体灰度信息的非线性变化有很好的适应性。优点二、支持尺度变化,即X/Y方向的缩放优点三 ...
-
第1章第一个C#程序 1.2 使用Visual Studio创建和运行1.2.1 C#控制台应用程序的步骤(1).新建项目 (2).生成可执行文件 (3).运行1.2.2 项目文件夹说明1.2.3 C#的Main() 方法(1) ...
-
一、设计思路1、用PLC控制一维运动平台实现电机的自动正反转运行及手动正反转运行;2、一维运动平台的行程两端各有一行程开关,分别定义为正向限位和负向限位;3、在电机自动正反转运行前,需对电机进行复位。复位的 ...
-
现如今由于各种因素,产品外表在生产过程中会产生污点、节点等各种缺陷,严重影响产品的质量和企业的形象。人眼往往不能及时准确的判断出瑕疵,强大的表面缺陷模式识别功能,根据表面缺陷的特征,在报警的同时,会指 ...
-
机械手机械传动追踪平行四边形的机械联动构造锥面摩擦变速器单曲轴对置活塞式发动机直升机双直列八缸蒸汽发动机小号涡轮变速箱机床拖板颚式破碎斗式提升水力旋流器手铐距工业机器人、视觉大神交流只差关注恭候您的加 ...
-
1、相机内参数是与相机自身特性相关的参数,比如相机的焦距、像素大小等;相机外参数是在世界坐标系中的参数,比如相机的位置、旋转方向等。相机标定(或摄像机标定):一句话就是世界坐标到像素坐标的映射,当然这 ...
-
有网友问,用三菱的是不是一般的工程师?而用西门子的是不是就很NB?他问得我都不知道知道回答他,这个要看你在那家公司上班,有的公司就要会用三菱的,而有的就要用西门子的,不能说会那个就是NB,我相信有的网友两 ...
-
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。一般方法是做模板,训练模板,识别,显示结果注意:小编还为你准备了多张图像供你 ...
-
先表演摇机吧~ 已关注 ...
-
前言一般发那科机器人通过U盘或者MC卡(又称CF卡,限AB柜)进行文件备份与加载。之前也说过一个特殊方式,就是通过网线连接电脑与机器人,机器人将电脑某个设定的文件夹作为文件备份与加载的路径,即FTP文件传输功能 ...
-
先表演摇机吧~ 您的浏览器不支持 video 标签 功能需求描述客户现场有一台机器人点胶应用,对现场码垛式工位(单层),通过机器人轨迹,逐一点胶作业。客户需求:1.因点位阵列排列,希望程序中仅需示教一个起点,其他 ...
-
先表演摇机吧~ 您的浏览器不支持 video 标签 发那科机器人实际有个自动退避动作功能(R861),可以通过指令记录轨迹,再通过指令调用记录的轨迹,返序执行轨迹,回到轨迹起点。(一)参数设置两种设置方法:参数页面 ...
-
前言机器人的点位资料信息中,不仅仅是点位信息。在点位信息为正交形式(即XYZWPR形式)时,还有配置项。本文着重介绍点位配置项的含义,并介绍相关应用案例。六轴机器人四轴机器人点位配置在进行点位记录时,已经自 ...
-
机器人所说的速度,一般都是指的TCP速度。TCP就是工具坐标系的原点。默认的TCP在机器人法兰中心。法兰就是机器人J6轴的中心。我们在程序中所写的运动语句(L运动类型)中的速度指的就是TCP速度。需要明白的是,程序 ...
-
前言常规的发那科机器人程序,是按序执行,即只能执行当前程序逻辑。而实际上应用过程中,我们需要同步执行多个逻辑,以发挥监控某信号、计算某逻辑等作用。本文将介绍发那科机器人多任务同步执行的几种方式。(一) ...
-
发那科机器人系统分北美版(R650)和中国版(R651)。在北美版本中,默认无密码功能页面。(其他功能差异此处不说明)本文介绍的意义在于通过此文的设定方式,对发那科机器人相关设置提供参考与启发。密码功能页面其 ...
-
发那科机器人主程序启动方式主要有三种RSR、PNS和STYLE启动。本文主要介绍PNS启动中,几个关键的设置问题。阅读者需要有一定的实际使用经验,以便更好理解。(一)问题一:启动程序的信号时序信号时序的仿真演示,如 ...
-
发那科机器人工具偏移功能,实质是替换工具坐标系,可支持对已有轨迹程序的整体或部分工具坐标系替换并复制。复制的程序可直接插入原有的程序中,也可以形成新程序,本功能是标配功能。例如,我们在安装焊枪A ...
-
发那科机器人有契合自己系统的2D与3D相机。相机并不是发那科自己生产,而是特定了品牌,如2D相机为basler和KOWA。相机可直连机器人控制柜,无需额外增加相机处理控制设备。2D相机可获得物体XYR空间信息,从而可对物 ...
-
发那科机器人程序调整(又称为即时位置修改)功能,可支持在线修改指定程序的指定行间机器人轨迹位置数据。减少停机,提高调试效率。本功能是标配功能。(一)列表页面设置下述所说的F1/F2/F3/F4/F5,指的是实体按键 ...
-
发那科机器人的第三方视觉补正逻辑,之前有文章写过,回顾文章点击下方链接: FANUC-机器人与第三方相机的应用逻辑(一) 发那科机器人与第三方相机视觉补正的情形主要有两 ...
-
发那科机器人程序调整(又称为即时位置修改)功能,可支持在线修改指定程序的指定行间机器人轨迹位置数据。减少停机,提高调试效率。本功能是标配功能。(一)列表页面设置下述所说的F1/F2/F3/F4/F5,指的是实体按键 ...
-
发那科机器人程序镜像功能,通过原轨迹与新轨迹参照点设置,可支持对已有轨迹程序的整体镜像偏移复制。复制的程序可直接插入原有的程序中,也可以形成新程序,提高轨迹调试效率。本功能是标配功能。镜像偏移与程序偏 ...
-
发那科机器人程序偏移功能,通过原轨迹与新轨迹参照点设置,可支持对已有轨迹程序的整体偏移复制。复制的程序可直接插入原有的程序中,也可以形成新程序,提高轨迹调试效率。本功能是标配功能。建议先看示例视频,再 ...






电梯 2026-05-04
一枚嵌入式码农 2026-05-04
