




 下一主题
下一主题热点推荐 更多
-
揭秘ABB机器人的num型数据和 KUKA机器人的 INT 和 REAL之间的区别
2026-06-05
-
机器人调试标准流程
2026-06-05
-

一图看懂|汇川技术2025年年报&2026年一季度报
2026-06-05
-
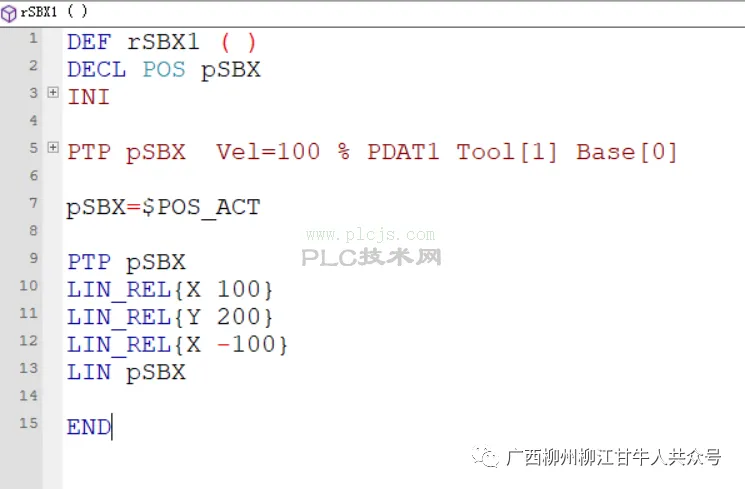
KUKA机器人四边形程序
2026-06-05
-

KUKA机器人计时器
2026-06-05
-
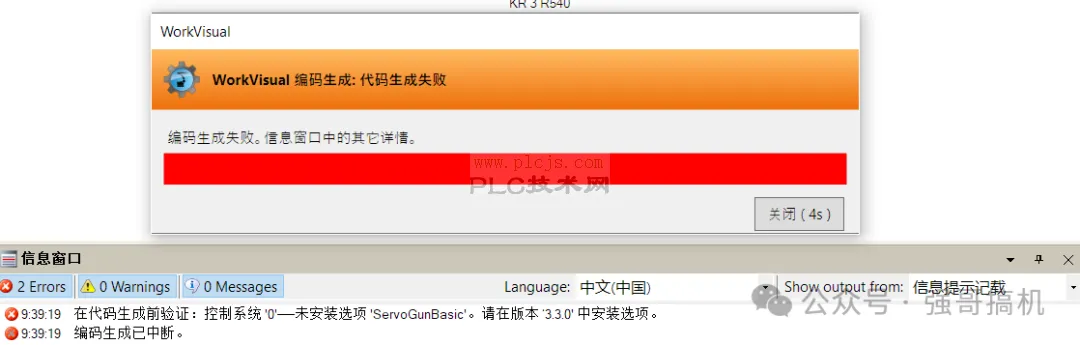
KUKA机器人在WorkVisual 项目上传时常见故障
2026-06-05
-

汇川机器人外部轴配置教程
2026-06-05
-
ABB机器人控制柜网口介绍
2026-06-05
-
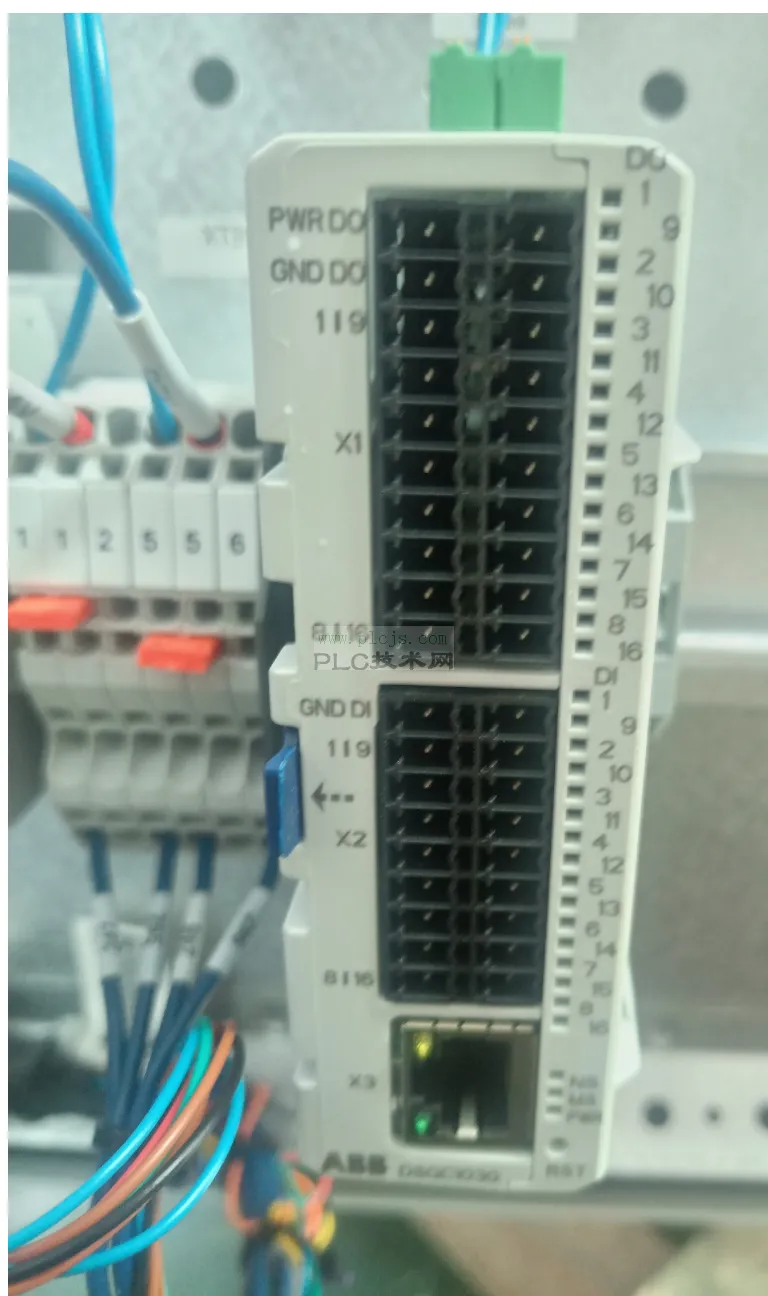
ABB机器人DSQC1030 IO板卡接线详解
2026-06-05
-
ABB机器人后台多任务判断输出原点信号
2026-06-05
