-
FANUC机器人EIP通讯EDS文件导出给PLC方法如下:1.MEANU主菜单——文件——文件。2.工具——切换设备——TP上的USB(U盘插入示教器上面的USB接口上)。3.备份F4——光标移到通讯配置——备份F4——保存完成即可。往期 ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
往期精彩回顾:FANUC机器人后台逻辑应用小技巧FANUC机器人如何做镜像备份还原FANUC蜘蛛手机器人校原点步骤西门子1200PLC和ABB机器人Profinet通迅GSD文件添加方法KUKA机器人示教器SmartPad用户组介绍KUKA机器人常用指 ...
-
优傲UR协作机器人编程详解1.使用VM虚拟机软件打开优傲UR仿真软件(双击对应的机器人型号,在此以UR5为例)。 免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
发那科机器人处于UOP自动分配状态时,系统会自动检索已配对设备,并分配相应的机架号。发那科机器人的不同的通讯协议对应的机架号不同,如果是手动配置需要设置机架,详细见下表。往期精彩回顾:FANUC机器人安全参 ...
-
1.1 仿真软件的下载。1)仿真软件的下载。在三菱机器人官网下载需要的软件版本,在此我们以RT_Toolbox3为例进行学习三菱机器人软件官网下载链接:https://me-fa.yangben.cn/robot/outlibs/70696898-50d9-4436-804 ...
-
ABB机器人通过定时中断程序适时获取机器人XYZ位置数据。1.PLC 想实时获取机器人机器人XYZ位置数据2.可以通过定时中断itimer来发送组输出实时发送数据3.此处举例使用Profinet(机器人做从站),发送组输出4.创建组 ...
-
一般 PLC 通过读取 UO[6]可以获得简单报警状态,但是有时 PLC 希望获得一些特定报警信息,以 PLC 显示机械手报警内容。主要方式是设置关联 DO,PLC 通过相应 DO 状态获得机械手报警信息。机器人更多系统报警输出, ...
-
FANUC机器人使用过程中,默认的数值寄存器数量为200个,位置寄存器数量为100个。如果在编程时,使用的寄存器的数量超过了上述的数量,就需要对寄存器数量进行扩展。根据我们使用寄存器的数量多少,来考虑是否增加寄 ...
-
ABB机器人圆柱体安全区域设置详解WZCylDef:圆柱体区域检测设定指令 免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
/PROG GOHOMG/ATTROWNER= MNEDITOR;COMMENT= "回原点";PROG_SIZE= 1070;CREATE= DATE 23-07-18 TIME 10:35:48;MODIFIED= DATE 23-10-05 TIME 15:26:56;FILE_NAME= ;VERSION= 0;LINE_COUNT= 55;MEMORY_SIZE= 1 ...
-
BitSet - 在一个字节或者双数值数据中设置一个特定位BitSet用于将byte数据或dnum数据中确定的特定位设置为1。例 1CONST num parity_bit := 8;VAR byte data1 := 2;BitSet data1, parity_bit;将变量data1中的比特编 ...
-
最近在调试机器人和视觉项目,推荐一个可以自动生成标定板网站;Camera Calibration Pattern Generator – calib.iohttps://calib.io/pages/camera-calibration-pattern-generator通过设置一些参数可以生成自动需要 ...
-
往期精彩回顾:如何在“东莞机器人之家”公众号搜索历史文章ABB360蜘蛛手机器人校原点步骤ABB机器人Multimove联动同步功能松下YD350GR5焊机和ABB机器人模拟量焊接安川机器人码垛程序揭秘ABB机器人用户权限丢失恢复 ...
-
FANUC机器人和基恩士视觉9点标点程序(基恩士视觉是在固定位置拍照不在机器人上面)程序来自于FANUC卢工编写,供大家参考学习交流,当然有人也会说FANUC机器人和基恩士视觉也有写好的现成的PC文件也可以自动9点标点 ...
-
FANUC机器人仿真如何安装外部模型工具和工具坐标创建方法:1.添加自带 CAD 库的手爪数模。如下图, [目录树]一[工具]一双击。弹出UT1 属性窗口,切换[常规]选项卡一点击了EOATs]里一在[grippers]中找到工具模型igs ...
-
现场PLC与机器人使用总线通讯方式时,PLC需求需要知道当前通讯状态,PLC 设定一个周期ON/OFFDI信号,机器人再DO反馈此信号即可。机器人后台无法发送周期脉冲信号。往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机 ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
当外部信号调用程序时,我们需要在配置项(menu一系统)中“7 专用外部信号”启用。但是,我们在切换手动动作机器人时,由于外部 UI[1]/UI[2]等信号未给出ON,导致无法手动动作机器人。或者,让 PLC 逻辑给出相应信号 ...
-
安川机器人和PLC以及视觉3方数据转换3方通讯分别是:安川机器人和汇川PLC走EIP通讯,汇川PLC和海康视觉走tcp通讯。海康视觉和PLC通讯,PLC接收到海康视觉的数据以用户组输入给到安川机器人。 免责声明:如果侵犯了 ...
-
往期精彩回顾:安川机器人仿真软件MotoSimEGVRC2020安装教程和软件安川机器人示教器按键界面认识安川机器人指令扩展小技巧安川机器人校原点安川机器人仿真软件工具坐标的创建和使用安川机器人外部IO启动安川机器人 ...
-
最近在重庆出差,客户现场有5台FANUC机器人,机器人IO设置分配都是一样的,其中有两台面机器人报警故障分别如下,但是机器人也能正常运动。经过与FANUC工程师沟通重新设置报警严重度,让报警不显示即可。设置画面如 ...
-
1.双击桌面仿真软件图标:2.点击机器人图标,选择对应的机器人型号。3.等待机器人进度条成功后,然后选择示教器。4.示教器画面加载中。5.示教器打开状态。往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如 ...
-
往期精彩回顾:安川机器人仿真软件MotoSimEGVRC2020安装教程和软件安川机器人示教器按键界面认识安川机器人指令扩展小技巧安川机器人校原点安川机器人仿真软件工具坐标的创建和使用安川机器人外部IO启动安川机器人 ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置FANUC机器人示 ...
-
KUKA机器人workvisual常见故障一:(WorkVisual 编码生成: 代码生成失败,在对文件 KRC:\Steu\Mada\$custon.dat(控制器3256580所属)进行语法分析时出错)。故障图片如下:解决方法如下:屏蔽文件 KRC:\Steu\Mada\$c ...
-
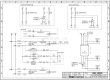
1.KUKA机器人外部轴直线导轨配置详解:硬件实物连接:2.WorkVisual配置外部轴。首先需要的软件是 Workvisual,将笔记本电脑和机器人用网线连接,网线一端插在电脑的网口上,然后打开控制柜的门,在控制柜的右侧板上 ...
-
往期精彩回顾:KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置基恩士视觉仿真软件备份下载程序KUKA机器人变量概览的配置KUKA机器人9个产品的码垛程序KUKA双工位码垛程序讲解KUKA机器人基 ...
-
往期精彩回顾:ABB机器人选项介绍FANUC机器人两台机器人共用一个安全区域详解ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUKA机器人变量概览的 ...
-
知道多更多资料请关注东莞机器人之家公众号。小技巧:如果机器人在TC2点上想快速返回TC1,可以把位置改为TC1,然后按住示教器上的FWD键,机器人可以快速返回TC1。揭秘2020工博会上的工业机器人亮点KUKA机器人用赋值 ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置FANUC机器人示 ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置FANUC机器人示 ...
-
1章 与机械手的连接通过 Ethernet 与 CV-X 连接使用以太网(Ethernet)连接线连接 CV-X 与机械手控制器的 LAN 连接器。 建议使用 5e 类以上的 STP 连接线。不经由集线器,而直接进行连接时,建议使用交叉线。 基恩 ...
-
FANUC机器人KAREL二次开发程序编写之二(3点构建用户坐标系)备注:以上文章来自互联网,本人在仿真软件上已经测试OK。--程序名PROGRAM CreatUsFrame--变量定义VARprm_type:INTEGERAR_Value:INTEGER --AR变 ...
-
随着国家的日渐强大,全世界都在说中国话,我们搞机时也难免会遇到客户需要对程序进行中文注释,那么KUKA机器人能否进行中文注释???答案是“O...YES...”我们在使用WorkVisual进行编辑时,貌似可以进行中文注释 ...
-
往期精彩回顾:基恩士视觉和FANUC机器人视觉引导定位抓取程序详解FANUC机器人和基恩士视觉9点标点程序推荐一个可以自动生成视觉标定板的网站FANUC机器人在线快速添加注释揭秘FANUC机器人扩展寄存器数据大小FANUCPay ...
-
FANUC机器人撞机后如何解除报警最近有个网友在公众号留言机器人在调试的过程中难免会出现意外的撞机情况,手动移开机器人又报碰撞监控被触发,这故障如何解决?切记不要慌,稳住慢慢来不急,且听下文分解。 ...
-
往期精彩回顾:FANUC机器人直线导轨外部轴配置方法详解FANUC机器人IO板CRMA52A和CRMA52B接线详解利用FTP连接机器人和电脑进行文件的备份与加载FANUC机器人主程序框架之1FANUC机器人与PLC使用总线通讯心跳信号FANUC ...
-
FANUC机器人仿真如何安装外部模型工具和工具坐标创建方法:1.添加自带 CAD 库的手爪数模。如下图, [目录树]一[工具]一双击。弹出UT1 属性窗口,切换[常规]选项卡一点击了EOATs]里一在[grippers]中找到工具模型igs ...
-
安川机器人和PLC以及视觉3方数据转换3方通讯分别是:安川机器人和汇川PLC走EIP通讯,汇川PLC和海康视觉走tcp通讯。海康视觉和PLC通讯,PLC接收到海康视觉的数据以用户组输入给到安川机器人。 免责声明:如果侵犯了 ...
-
现场PLC与机器人使用总线通讯方式时,PLC需求需要知道当前通讯状态,PLC 设定一个周期ON/OFFDI信号,机器人再DO反馈此信号即可。机器人后台无法发送周期脉冲信号。往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机 ...
-
1章 与机械手的连接通过 Ethernet 与 CV-X 连接使用以太网(Ethernet)连接线连接 CV-X 与机械手控制器的 LAN 连接器。 建议使用 5e 类以上的 STP 连接线。不经由集线器,而直接进行连接时,建议使用交叉线。 基恩 ...
-
KUKA带枚举数据类型的 switch-case 分支:DEF MY_PROG( )枚举数据类型彩色:红色、黄色、蓝色、橙色ENUM COLOR_TYPE red, yellow, blue, greenDECL COLOR_TYPE my_color...INImy_color = #red...SWITCH my_colorCASE ...
-
ABB机器人故障项目背景描述:在一汽出差客户现场有台ABB机器人需要我过去帮忙支援下,机器人之前是做点焊应用的,现在是利旧做搬运应用,开机报各种故障。 免责声明:如果侵犯了您的权益,请联系站长,我们会及时删 ...
-
备注:本次是网络课程学习后整理的电子笔记,仅供学习参考切勿商用。西门子1500PLC用SCL语言编写小车往返程序:程序要求如下:小车开始时停在最左边,限位开关10.2为1状态。按下起动按钮,Q0.0变为1状态,小车右行。 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注也可点击公众号下方 往期经典 浏览更多内容转载请先后台留言,大家一起支持原创,推动机器人使用和发展本公众号对各类ABB机器人应用,仿真,毕业设计提供技术支持, ...
-
FANUC机器人和海康威视相机通讯程序: 免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
-
PLC把ABB机器人当一个轴来调用程序案例分享: 免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!






电梯 2026-05-04
一枚嵌入式码农 2026-05-04
