-
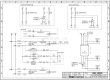
最近经常有朋友在问KUKA机器人X55 外部供电是如何接线的?废话不多少说,直接上菜请看下文分解。往期精彩回顾:1.FANUC机器人DI/DO、GI/GO、UI/UO、RI/RO信号详解2.ABB机器人集成视觉调试步骤详解3.ABB机器人集成视 ...
-
知道多更多资料请关注东莞机器人之家公众号。揭秘ABB机器人用户权限丢失恢复步骤揭秘2020工博会上的工业机器人亮点KUKA机器人用赋值偏移指令一点画圆和方的秘密KUKA机器人通过cellsrc来外部调用并启动机器人程序ABB ...
-
FANUC 零点数据存在问题的机器人通常会出现以下几种报警:(1)SRVO-062报警 - 脉冲编码器数据丢失,机器人完全不可以动;(2)SRVO-075报警 - 脉冲编码器无法计数,机器人仅可以单关节运动;(3)SRVO-038报 ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置FANUC机器人示 ...
-
▼东莞机器人之家,关注有惊喜▼小编微信公众号二维码单击对应二维码,长按添加小编为好友▲喜欢的朋友记得同时关注下面公众号《电气自动化之家》。后期会给大家带来更多的电气自动化相关的知识分享,谢 ...
-
欢迎关注订阅广西柳州柳江甘牛人共众号:制作和转发各种资讯和文章,国家政治、经济、文化、科技、教育和工业机器人等,为家乡带言!——20190220韦作潘ABB机器人字符串拆分转换数值指令说明:ABB机器人在通讯时候 ...
-
在描述空间的一个点位时,除了坐标值(x,y,z)外,还要确定到达点位的姿态(q1,q2,q3,q4)。当然,这里暂不考虑轴配置。在ABB机器人中,用的是四个一组的四元数。但对于小白的我们,不好理解什么是四元数(q1,q2,q3,q4), ...
-
ABB机器人通过定时中断发送机器人轴关节位置数据,创建6个轴组信号G_AXIS,通过获取轴关节指令cJointT赋值给到轴组信号。轴关节通常机器人每个轴的运动范围是正负360度,(因此把每个轴关节位置数据+500放大再发送出 ...
-
欢迎关注订阅广西柳州柳江甘牛人共众号:制作和转发各种资讯和文章,国家政治、经济、文化、科技、教育和工业机器人等,为家乡带言!——20181220韦作潘Fanuc机器人IO配置和UOP配置说明:这几天直接跳转发送Fanuc部 ...
-
喜欢的朋友记得关注并分享《电气自动化之家》公众号。西门子1200PLC控制应急灯启用程序:有两个灯,如果有一个灯坏了,立马启动第二个备用应急灯。IO分配如下:输入点:I0.0打开灯1I0.1关闭灯1输出点:Q0.0灯1Q0.1 ...
-
ABB360蜘蛛手机器人校原点步骤:ABB360机器人1轴0刻度如下,2轴和3轴同理。ABB360机器人4轴0刻度如下。注意:单独一个轴移到机器人0刻度位置后,一个轴一个轴的转数计数器更新。往期精彩回顾:FANUC机器人宏程序MAC ...
-
备注:以上文章来自互联网,本人在仿真软件上已经测试OK。FANUC机器人KAREL二次开发程序编写之一(字符串的截取)PROGRAM TEST_CREAT --程序名VAR --变量声明 ...
-
往期精彩回顾:安川机器人仿真软件MotoSimEGVRC2020安装教程和软件安川机器人示教器按键界面认识安川机器人指令扩展小技巧安川机器人校原点安川机器人仿真软件工具坐标的创建和使用安川机器人外部IO启动安川机器人 ...
-
想知道多更多资料请关注东莞机器人之家公众号。ABB机器人IO基本操作和接线练习说明:这里对ABB工业机器人的IO进行基本操作,机器人输入输出接线,做简单接线说明和对应操作。基本操作包括设定为常用IO信号,信号查 ...
-
FANUC机器人矩阵程序备份为ASCII程序便于用记事本查看程序内容之前想过用其他的方法来写,后面感觉最笨的方法才是最直观和实用,热烈欢迎各位机友有好的思路可以评论区留言。/PROG WZJS1_180/ATTROWNER= MNEDITOR ...
-
1.打开FTP软件,编辑——设置——超时秒数设置为0表示禁用。2.文件——站点管理器。3.新站点——协议:FTP_文件传输协议——主机IP和机器人设置的IP一样。4.机器人示教器设置如下图:需要FTP软件的请关注东莞机器人之 ...
-
往期精彩回顾:ABB机器人常见故障之(1)ABB机器人的控制柜和示教器的认识ABB仿真软件RobotStudio批量创建IOABB机器人添加外部轴(导轨)小技巧ABB工业机器人两台或多台机器人DeviceNet的通信揭秘ABB机器人用户权限 ...
-
FANUC机器人位置寄存器赋值偏移和偏移PR两种方式画方形轨迹:一.FANUC机器人位置寄存器赋值偏移画方形轨迹/PROG TEST12/ATTROWNER= MNEDITOR;COMMENT= "";PROG_SIZE= 388;CREATE= DATE 22-02-12 TIME 14:31:42;M ...
-
1.之前外部启动是正常,机器人示教器钥匙切换到远程模式没有输出信号50056?解决方法:输入/输出——虚拟输入信号——强制输出#87015选择CMD遥控。2.安川机器人同一个点有时可以走,有时会报警4980“目标点超极限 ...
-
安川机器人外部暂停信号屏蔽方法详解:登录安全模式,主菜单——安全模式——密码16个5。(成功登录后会有3把钥匙加一个+号的图标)。2.输入/输出——虚拟输入信号。3.按下示教器的【选择】键,通过【▲】和【▼】 ...
-
FANUC机器人如何从备份创建系统1.打开FANUC ROBOGUIDE仿真软件——新建工作单元。2.选择机器人对应的版本用途,这里以HandlingPRO ROBOGUIDE标准工作单元,然后点击下一步。3.工作单元名称默认即可,然后点击下一步 ...
-
在前面两篇文章中讲了FANUC机器人软浮动的相关的功能和设置方法,接下来这篇文章给大家分享下FANUC机器人软浮动的技巧。软浮动开始时,必须处于不施加外力的状态。若在施加了重力以外的外力的状态下,执行软浮动指 ...
-
一.TCP通讯介绍上位设备的IP地址和端口号的设定在通信连接前,需设定与机器人通信的上位设备的IP地址和端口号。变量定义表(B变量 S变量)·S变量S090:视觉(服务器)IP地址S091:视觉(服务器)端口号S092~S099:合并后为 ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
欢迎关注订阅广西柳州柳江甘牛人共众号:制作和转发各种资讯和文章,国家政治、经济、文化、科技、教育和工业机器人等,为家乡带言!——20181220韦作潘Fanuc机器人IO配置和UOP配置说明:这几天直接跳转发送Fanuc部 ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置KUKA机器人夹 ...
-
往期精彩回顾:FANUC点位配置详解四大家族机器人模型下载方法详解值得收藏和推荐FANUC机器人运动指令详解FANUC机器人EIP通讯设置FANUC机器人程序中止方法详解FANUC机器人直线导轨外部轴配置方法详解FANUC机器人回原 ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置FANUC机器人示 ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
FANUC机器人两台机器人共用一个安全区域详解两台机器人共用一个安全区域设置非常重要,设置不好两台机器人干架了两败俱伤,机器人手臂撞坏了更换成本高也比较耗时、客户对供应商的印象和口碑也不好,所以对机器人调 ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
FANUC机器人KAREL二次开发程序编写之二(3点构建用户坐标系)备注:以上文章来自互联网,本人在仿真软件上已经测试OK。--程序名PROGRAM CreatUsFrame--变量定义VARprm_type:INTEGERAR_Value:INTEGER --AR变 ...
-
背景:FANUC机器人在滚边工艺调试的时候,为了调试的方便可以设置增量点动,具体步骤如下:1.系统——配置。2.增量点动详细。3.增量设置距离/角度,然后启用,关机重启生效即可往期精彩回顾:ABB机器人选项介绍松下 ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置FANUC机器人示 ...
-
安川机器人快速一键恢复功能方法一:最常见的方法就是把备份文件重新上传到示教器中,相信很多人会在这不再赘述,重点讲方法二。安川机器人快速一键恢复功能方法二:1.设置——示教条件设定。2.删除程序的还原功能, ...
-
往期精彩回顾:KUKA机器人workvisual常见故障KUKA机器人如何查看机器人和控制柜一一对应KUKA机器人和基恩士视觉通讯文件详解KUKA机器人外部轴直线导轨配置详解库卡机器人输出信号断电保持功能如何设置FANUC机器人示 ...
-
往期精彩回顾:FANUC机器人直线导轨外部轴配置方法详解FANUC机器人IO板CRMA52A和CRMA52B接线详解利用FTP连接机器人和电脑进行文件的备份与加载FANUC机器人主程序框架之1FANUC机器人与PLC使用总线通讯心跳信号FANUC ...
-
FANUC机器人快速导入IO配置文件和位置寄存器数据当我们将一台机器人的I/O分配设定完毕,注释也已经写完,如果其他机器人的分配一样,可以通过直接导入已经分配完的机器人参数来完成其他机器人的信号配置及注释写入 ...
-
FANUC机器人使用在线快速添加注释方法1.MENU——2.设置——3.主机通讯。4.再选择“1 TCP/IP”协议,进入设置主机通信页面。点击 F3【端口】可进行端口#1 和端口#2 切换,此处选择端口#1(默认),设置机器人 IP 地址 ...
-
1:设置坐标系(menu--设置一坐标系)负载(menu-系统一动作)、速度速度通过数值寄存器赋值。修改速度,直接对数值寄存器(date,F1 类型一数值寄存器)修改即可。2:检测设定的安全位(menu一设置一参考位置。第-参考位置 ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
上一篇文章分享了基恩士视觉和FANUC机器人视觉引导定位抓取程序详解是相机安装在机器人手臂上面,接下来要分享的是另一种安装方式,相机在固定位置拍照没有安装在机器人手上面二次精拍补偿XY和角度Rz。/PROG PAIZ ...
-
ABB新款OmniCore系统示教器更改中文语言1.点击Settings。2.TIME/Language。3./Language——中文chinese——Apply。往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。AB ...
-
往期精彩回顾:ABB机器人选项介绍松下YC315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。ABB真实示教器批量创建IO信号ABB机器人RobotStudio软件安装失败原因与解决方法解密ABB仿真软件轨迹的镜像程序编写KUK ...
-
FANUC机器人位置寄存器和IO可以通过IE浏览器连接机器人控制柜快速输入注释。那么程序中如果需要加入中文注释,一可以示教器按键直接打中文,这种效率一般比较低;二是通过仿真软件输入中注释后再加载到真实的机器人 ...
-
往期精彩回顾:1.KUKA双工位码垛程序讲解2.安川机器人快捷键自定义设置3.ABB机器人自定义中文错误并写入事件日志4.FANUC机器人程序运行外部控制篇—RSR控制5KRC4Compact电气维护手册之故障排除6.安川机器人仿真软件 ...
-
往期精彩回顾:基恩士视觉和FANUC机器人视觉引导定位抓取程序详解FANUC机器人和基恩士视觉9点标点程序推荐一个可以自动生成视觉标定板的网站FANUC机器人在线快速添加注释揭秘FANUC机器人扩展寄存器数据大小FANUCPay ...
-
Fanuc机器人PNS程序RSR程序启动改说明:这里主要了解Fanuc机器人的自动运行条件,选择PNS、RSR程序名的启动方式,通过外部IO选择不同PNS和RSR程序并启动运行。具体的一些操作步骤和过程,需要去机器人上面进行验证 ...
-
ABB 机器人 Multimove-联动同步功能1、所需备件:两台机器人、两个控制柜(标准柜)、一个示教器、交换机 DSQC1007,网线4 根,K41.X11 线一条、选项密钥。如下图:两台机器人和控制柜,一个示教器交换机 DSQC1 ...
-
往期精彩回顾:ABB机器人TESTCASE根据表达式的值指令ABB机器人常用的人机交互指令KUKA机器人X55外部供电和倍福IO模块接线详解ABB机器人通过定时中断发送机器人轴关节位置数据ABB机器人如何快速通过PLC输入数字编号 ...






电梯 2026-05-04
一枚嵌入式码农 2026-05-04
