



- 详述用ROBOTLOAD测算机器人载荷的操作。
- ABB机器人IRB1100 IRB1090 CRB1100机械原点详细图解说明
- 视频:ABB机器人安全控制器软件同步操作
- ABB机器人报警20293(请求操作受限)故障处理指南(含视频)
- 通过C#编程上传程序模块到机器人控制器
- ABB机器人控制柜V250XT安全面板接线说明
- ABB机器人报警50534(机械手控制器与存储器数据差异)处理全流程指南
- ABB机器人IRC5控制柜90214报警的处理原理,另电机高温报警的说明处理也附上。
- ROBOTSTUDIO中无法安装虚拟OMNICORE示教器的可能情况说明
- ABB机器人IRB1300手臂上附加负荷情况详解

 下一主题
下一主题热点推荐 更多
-
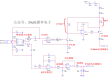
整理几种工业的4~20mA和0~5V/10V输出电路方案,大同小异又各有千秋
2026-05-10
-

不学白不学!15块钱的三线制PT100的4~20mA环路变送器电路方案详细分析!
2026-05-11
-

高级工认定必看:S7-1200PLC花样流水灯难点拆解,附完整程序+实操指南
2026-05-25
-

告别扫描周期限制!S7-1200 高速计数器如何轻松搞定 100KHz 脉冲?
2026-05-25
-

数值总是有延迟?揭秘S7-1200 高速计数器外设地址“:P”的实战妙用
2026-05-25
-

RS232、RS485、RJ45、Modbus协议…这篇帮你整明白
2026-05-25
-

S7-1200PLC报警了怎么办?3步快速排查故障
2026-05-25
-

TCP协议的三次握手、四次挥手原理是什么?
2026-05-25
-
PLC和继电器接线看似简单,没想到藏着这么多门道
2026-05-25
-

S7-200老PLC别急着换!3分钟把程序迁移到S7-1200,附10个避坑要点
2026-05-25
