-
更多内容请点击上方 ABB机器人实战技巧 关注也可点击公众号下方 往期经典 浏览更多内容1 现场使用变位机配合机器人很多。比如下图的3轴头尾架变位机2 上图的三轴,在多数情况下不需要3个轴一起动,同 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注也可点击公众号下方 往期经典 浏览更多内容转载请先后台留言,大家一起支持原创,推动机器人使用和发展1)现场有较大原材料折弯件,需要两台机器人一 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注也可点击公众号下方 往期经典 浏览更多内容转载请先后台留言,大家一起支持原创,推动机器人使用和发展1)ABB机器人控制柜内右侧有一安全板2)其中X1 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注1) 如果有下图两个产品,已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转) & ...
-
更多内容请点击上方 ABB机器人实战技巧 关注CONST VAR PERS 区别1)ABB机器人任何数据都有存储类型,分为常量CONST,变量VAR和可变量PERS2)常量CONST,即程序内不能赋值3)变量和可变量程序都能赋值,区 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注1拖入yumi,导入抓手并安装到机器人,并创建系统 2&nbs ...
-
更多内容请点击上方 ABB机器人实战技巧 关注现在也可点击公众号下方的 往期经典,查看所有经典文章1如下图,双机器人+变位机系统,使用Multimove,(即一台控制器,一个示教器,三个运动任务) ...
-
1)机器人执行程序都是一行一行执行的,比如:2)如果机器人在执行第1行的时候,收到了cam_di信号,而运行到第3行的时候,cam_di信号被PLC置为FALSE了,那么执行第4行的时候,机器人就会一直等待信号。3)实际上,ca ...
-
1)导入左抓手,右抓手和底座2)建模-创建机械装置3)设置名称,类型选择工具4)添加链接5)选择底座,并设置为BaseLink,点击箭头添加,然后应用6)同理添加左抓手和右抓手,如下图添加接点7)类型因为抓手直线运动 ...
-
1)有如下例行程序Prg_1,Prg_2,Prg_3,Prg_4,2)3)如何快速调用4个有规律程序?4)5)使用百分号可以调用程序,百分号里为字符串6)‘Prg_“是规律前缀7)使用“+”号可以把字符串连接起来8)使用NumToStr把reg1 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注1)机器人控制器有如下网口,其中X2 是服务端口,ip固定192.168.125.1X3连接了示教器X7连接了安全板X9连接了轴计算机 2)电脑robotstudio连接机器人,连接 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注1)什么是码垛?有规律的移动机器人进行抓取及放置2)如何简便码垛程序设置好工件坐标系,工具,对第一个码垛放置点进行示教,xyz方向的间距和个数可设3)如何 ...
-
欢迎点击上方ABB机器人实战技巧关注公众号,本号文章均为原创ABB机器人深入应用1)什么是socket通讯?就是TCP/IP通讯,无协议,在微软环境下称为socket2)socket通讯能干什么?可以收发制定的数据,包括sting字符串 ...
-
使用WorldZone功能创建机器人HOME位输出功能1)机器人需要有Worldzone功能 2)创建routine,例如power_on 3)插入定义worldzoneHome位指令WZHomeJointDef,如下其中第一个为HOME位,数据类型为JointT ...
-
1)什么是数组?将相同数据类型的元素按一定顺序排列的集合2)有什么用?比如创建一个robtarget类型的数组p_array,p_array里有10个点位,走完10个位置就可以用如下代码,方便简洁FOR i FROM 1 TO 10 DO MoveL ...
-
1)什么是参数例行程序?例行程序可以输入参数,使用的时候看起来就像自定义指令2)有什么用?方便使用,用户不用关心内部实现过程3)如何创建1)新建例行程序2)设置名称,点击参数,设置输入参数3)添加参数,注意 ...
-
1)相机发过来的是xy和theta,通过上一讲,我们已经从字符串里提取出x,y和theta值了,但是机器人点位robtarget里组成的是trans:xyz以及rot:q1-q4。2)ABB机器人用四元数表示角度,如何转化角度到四元数?3)新建一 ...
-
1)使用2台机器人,一台做socket的server(模拟相机发送坐标),另一台做client,模拟正常机器人接受相机数据2)Client向server请求拍照,第一次server给出数据0,0,0,则机器人走到workobject坐标系下的0,0,0,即演示 ...
-
1)相机通常发送字符串给机器人,比如”1.23,4.56,7.89\0D”,即x为1.23,y为4.56,z的角度为7.89,用\0D作为结束符,数据之间用“,”隔开。2)如果机器人收到上述字符串,如何把字符串提取出来并付给变量deltaX,de ...
-
1)创建一个锥形体,代表固定工具2)调整固定工具位置3 创建工具数据robhold设为false4)使用捕捉末端,创建工具坐标,调整角度5)完成后,有固定工具tool_data56)导入工件,调整位置,并安装到机器人,弹框是 ...
-
1)什么是数据类型?诸如robtarget,jointtarget等,把一系列相关元素集合在一起,类似结构体2)如何查看系统的数据类型Robotstudio的指令功能数据类型3)ABB机器人是否可以自定义数据类型?可以4)如何创建自定义数 ...
-
1)如果有上图所示6个产品位置要吸取,如何最快速的创建点位?(纯示教?Naive,太体力活了。)2)如下图,我们可以发现1号位置和0号位置姿态一样,1号相对于0号就是一个半径的偏移,2-6号位置相对于0号也都是 ...
-
更多内容请点击上方 ABB机器人实战技巧 关注也可点击公众号下方 往期经典 浏览更多内容转载请先后台留言,大家一起支持原创,推动机器人使用和发展本公众号对各类ABB机器人应用,仿真,毕业设计 ...
-
目录:一、选型指南二、不同类型相机的主要特征三、面阵相机与线阵相机的对比四、CCD芯片与CMOS芯片的区别五、面阵相机的一些常用参数释义海康机器人作为全球领先的智能物联解决方案提供商,其工业视觉产品线专注于 ...
-
工业视觉中经常听到九点标定,本次我们讲解海康的VM软件的标定使用方法,首先,我们先讲一下九点标定的含义: 我们常说的九点标定,实际上是一种通过标定的方 ...
-
紧急修复|ABB机器人10037轴未同步故障?专业团队2小时响应,当天解决生产停摆危机!当ABB机器人突然弹出10037故障代码,屏幕上“轴未同步”的警示灯亮起时,你的生产线是否瞬间陷入停滞?作为工业自动化领域的核心 ...
-
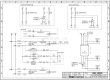
I/O说明DI-单个数字输入信号DO-单个数字输出信号GI-组合输入信号,使用8421码GO-组合输出信号,使用8421码AI-模拟量输入信号AO-模拟量输出信号注:使用相应的输入输出信号必须配备相应的输入输出板★ 输入输 ...
-
那些和原生物一毛一样的仿生机器人简直让人毛骨悚然不信看看这个Robugtix仿生狼蛛虽然只是一个高科技玩具但动起来真的很吓人啊组起队来分分中能灭掉boss的感觉ACM-R5H仿生蛇扭动起来和真蛇没啥区别,吓得象君鸡皮疙 ...
-
在实际的工作现场中,我们经常会碰到零点丢失(如图1-1)的情况。一旦零点丢失了机器人就无法运行程序,为了让机器人正常运行,不耽误生产。那么此时我们就需要零点校准,那么针对KUKA机器人的零点校准我们有哪些方法 ...
-
在生活中,很多超市都有在销售矿泉水、饮料什么的,大量的需求对企业的压力也是很大的,老板需要很多员工去完成产品的检测。我们在购买饮料的时候也会比较看看,饮料多了还是少了。企业老板们为了避免不合格产品流入 ...
-
做手术还要开胸开肚皮?这些早就OUT了,微创手术也已不是新鲜事。更为先进的是,只需在手术部位开几个小孔,手术机器人会“站”在手术台旁为你做完这台复杂的手术,比人更灵活的“手腕”可以进行更精细化和更复杂的 ...
-
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。首先,我们要了解,机器人领域的视觉(Machine Vision)跟计算机领域( ...
-
随着自动化生产线、无人工厂的普及,工业机器人成为不可或缺的一部分,广泛用于生产、加工、搬运、测量和检验等环节,那么工业机器人是怎么制造的呢?下面视频揭晓:时长13:05,请在WiFi下观看文章来源:机工教育免 ...
-
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
-
安装机器人在安装机器人之前,首先要检查设备是否缺件,用眼睛观察机器人是否完好无损。然后安装控制柜,用叉车或吊车吊装机器人本体。最后连接机器人本体与控制柜,机器人与控制柜的连接主要是电动机动力电缆与转数 ...
-
工业机器人真正的应用是用在生产线上(如汽车组装生产线、半导体硅片搬运等),机器人单机各种搬运动作轨迹等都调试好了,还要配合生产线上的动作要求,也就是还要和PLC连接进行通讯,双方交互信号,PLC什么时候让机 ...
-
在一些工厂里你是否经常看到下图这样的一些自动化设备,他的里边有用到机器人与相机通讯完成物料位置的检测与物料抓放等功能,那么恭喜你,几分钟时间阅读完这篇文章你就懂了。小编花了不少时间收集整理资料,下面是 ...
-
下面这些是比较常见的流水线多数是做些简单的工作,比如传动:灌装包装有的甚至还需要人工协作铁链的制作过程:另一种链接方式的接着看些不常见的,比如晾衣架制作:小号金属链子曲别针制作铁丝网弹簧制作钢珠蜡烛的 ...
-
导读:由于机器人时刻都在运动且速度非常快,这样难免会出现碰撞到设备或者操作人员。所以,在现场,必须加入紧急停止功能保护操作人员或者设备。不管是何种的工业机器人都会留有紧急停止端子供使用者接入停止按钮或 ...
-
机器视觉处理软件:用来完成输入图像数据的处理,通过一定的运算得出结果,这个输出的结果可能是PASS/FAIL信号、坐标位置、字符串等。常见的机器视觉软件以C/C++图像库,ActiveX控件,图形式编程环境等形式出现,可 ...
-
当一个或多个机器人轴的移动超出软件运动限制时,发生超程错误。发生超程错误时,其中一个超程限位开关启动,系统做出如下动作:1.关闭伺服系统驱动电源,实施机器人制动2.显示超程报警错误消息3.点亮操作面板 FAULT ...
-
01机械手损坏恢复步骤当配备了机械手损坏硬件的机器人上的机械手损坏检测开关跳闸时,发生机械手损坏错误。当机器人的刀具遇到可能导致刀具损坏的障碍物时,开关跳闸。系统将:1.关闭伺服系统驱动电源,实施机器人制 ...
-
智能制造在国内正蓬勃发展,虽然现在的发展还受到很多限制,但是总的来说,我们正走在智能制造的大路上。智能制造离不开设备与设备之间、人与设备之间的互联互通。作为新科技时代技术人员的你,如果对物联网感兴趣, ...
-
在一些工厂里你是否经常看到下图这样的一些自动化设备,他的里边有用到机器人与相机通讯完成物料位置的检测与物料抓放等功能,那么恭喜你,几分钟时间阅读完这篇文章你就懂了。小编花了不少时间收集整理资料,下面是 ...
-
01机械手损坏恢复步骤当配备了机械手损坏硬件的机器人上的机械手损坏检测开关跳闸时,发生机械手损坏错误。当机器人的刀具遇到可能导致刀具损坏的障碍物时,开关跳闸。系统将:1.关闭伺服系统驱动电源,实施机器人制 ...
-
对于以下几种喷漆工具情况,可采取特殊的恢复步骤:1.制动控制解除2.清洗错误3.执行 进入清洁器 机器人动作,不执行 退出清洁器 机器人动作4.生产期间取消 /继续循环5.输入 /输出写入错误采用第一小节步骤进行解除或 ...
-
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。首先,我们要了解,机器人领域的视觉(Machine Vision)跟计算机领域( ...
-
对于准备入手学习机器视觉的新手们,如果不了解工业相机和普通相机的区别,往往会造成花钱购买了设备却达不到想要的结果!!!这是怎么回事呢?听小编来给你慢慢道来:由于之前没接触过视觉,通过百度科普大概知道视 ...
-
机器人管线包的作用是什么?机器人管线包用来保护机器人线束,有助于减少电缆的损坏和老化,并显著提升电缆的使用寿命,减小线束对机器人运动轨迹的限制。针对管线包,上海发那科为用户提供两类标准的解决方案——CPP ...
-
机器人在运输过程中有时会造成机器人轴零点丢失,或者在更换电机、RDC后也会造成机器人轴零点丢失。这时就需要专用的工具对机器人轴进行零点校准。机器人轴零点校正工具:EMD机器人轴各零点位置:校正步骤:step 1: ...






电梯 2026-05-04
一枚嵌入式码农 2026-05-04
