一、汇川伺服运动控制
1. 核心:掌握AM600通过CANopen控制变频器的完整流程
关键能力:
变频器启停与运转方向控制
变频器频率计算与参数配置
CANopen通信协议的实际应用
2. 变频器CAN参数配置
1)硬件组态配置
主从站架构:
AM600作为CANopen主站
MD810变频器作为从站
模块配置:
MD810采用分立式设计,需添加1个整流模块和2个逆变模块
在Network Configuration中勾选CANopen主站选项
波特率设置:
必须与变频器参数配置的波特率严格一致(典型值500Kbit/s)
在CANopen Master配置界面设置同步周期为100000μs
2)PDO配置规范
接收PDO:
控制字(启停/方向控制)
频率设定值(单位0.01Hz)
加速时间(通过F0-19设置单位为10ms)
减速时间(同加速时间单位)
发送PDO:
状态字(运行状态指示)
故障码(故障诊断)
编码器反馈频率(单位0.01Hz)
地址转换规则:
功能码转索引号:F→0,A→4,U→7,再加2000
子索引号:功能码数字部分+1转16进制
3)变量映射实现
映射方法:
接收PDO映射到%QW地址段(如%QW48控制字)
发送PDO映射到%IW地址段(如%IW96状态字)
变量类型匹配(UINT/INT)
专家模式:
需在从站参数配置中启用"专家设置"
支持自定义PDO内容和通信参数
3. 变频器频率控制
1)转速频率换算原理
基本公式:
设定转速/额定转速 = 设定频率/额定频率
额定参数:3000r/min对应200Hz
线速度转换:
转速(r/min) = 线速度(mm/s)×60/(2π×轴半径mm)
示例:180mm半径,20mm/s → 1.061r/min
减速机处理
减速比影响:
7:1减速机需将电机转速计算值×7
最终频率 = 计算频率×7×100(0.01Hz单位)
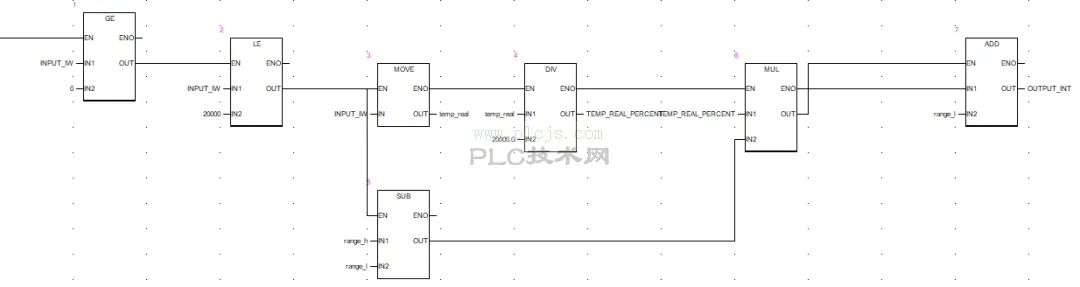
数值处理
整数化要求: 频率值需转换为整数(如37.8236Hz→3782)
在Inoproshop中使用REAL_TO_INT转换
2)实操案例
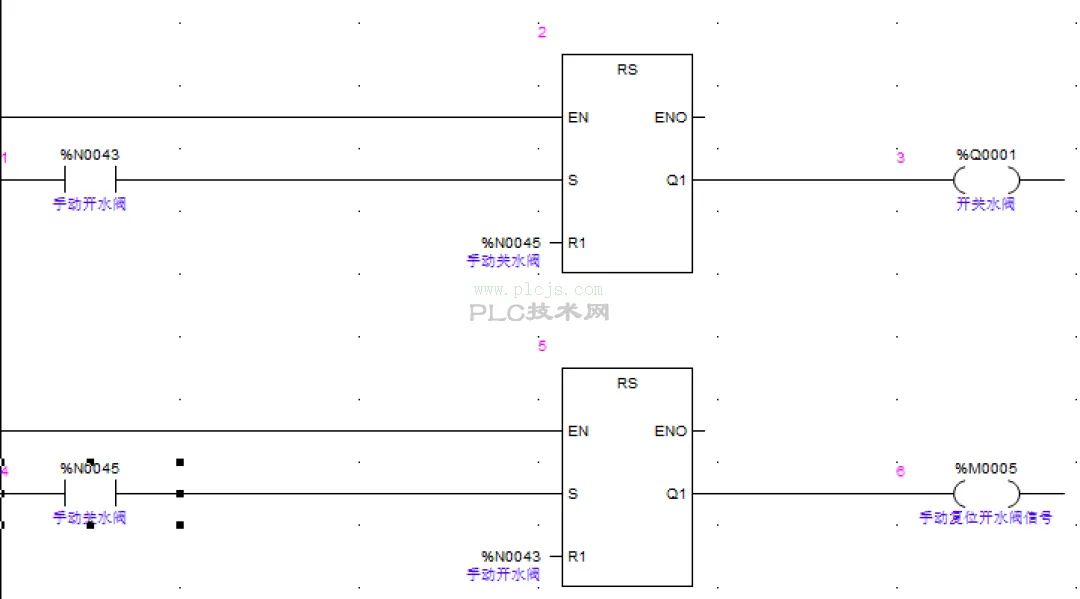
控制逻辑:
通过触摸屏变量触发启停(上升沿检测)
正转控制字=1,反转=2,停止=6(减速停止)
加速度/减时间参数实时写入
安全措施:
实操前需卸除材料(释放气胀轴)
独立测试各轴正反转功能
4. 练习
功能码转换:
U3-16的PDO索引计算(主索引163000,子索引1611) 频率关系:
设定频率 = (设定转速×额定频率)/额定转速
异常测试:
正转指令+负频率将导致变频器报错
二、知识小结
知识点 | 核心内容 | 重点/易混淆点 |
AM600控制CANopen变频器 | 主从站配置(AM600主站,MD810变频器从站)、整流/逆变模块添加、波特率设置(500kbps) | 功能码转索引规则(如F0-17→162000+子索引偏移) |
PDO配置 | 接收PDO(控制字、频率、加减速时间);发送PDO(状态字、编码器反馈频率、故障码) | 变量映射关系(程序变量与PDO索引关联) |
变频器频率计算 | 公式:设定频率 = (设定转速×额定频率/额定转速)×减速比×100(单位:0.01Hz) | 减速比影响(7:1需×7) |
实操步骤 | 1. 组态勾选主站;2. 添加整流/逆变模块;3. 配置PDO映射;4. 程序转换转速→频率 | 触摸屏控制逻辑(上升沿触发启停/方向) |
习题 | 1. 频率计算应用题(线速度→转速→频率);2. PDO配置流程;3. 故障码解析 | 单位换算易错点(转/秒→转/分→Hz) |





 下一主题
下一主题